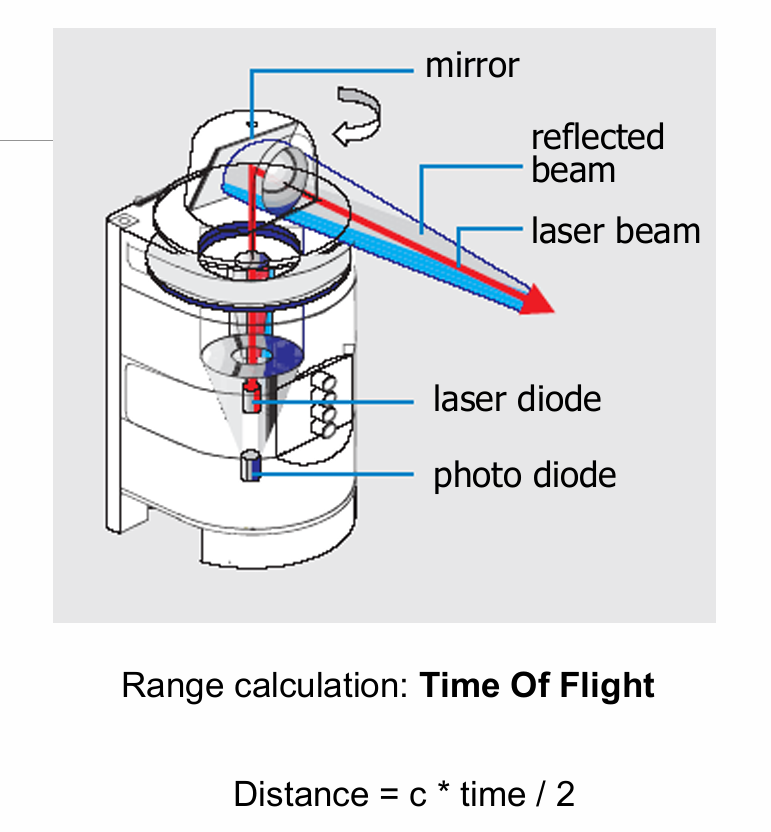
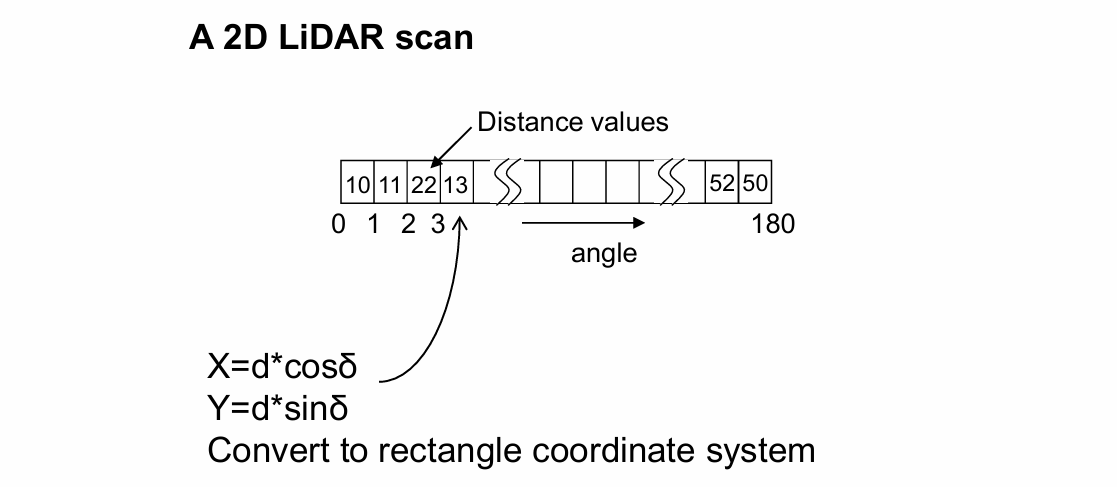
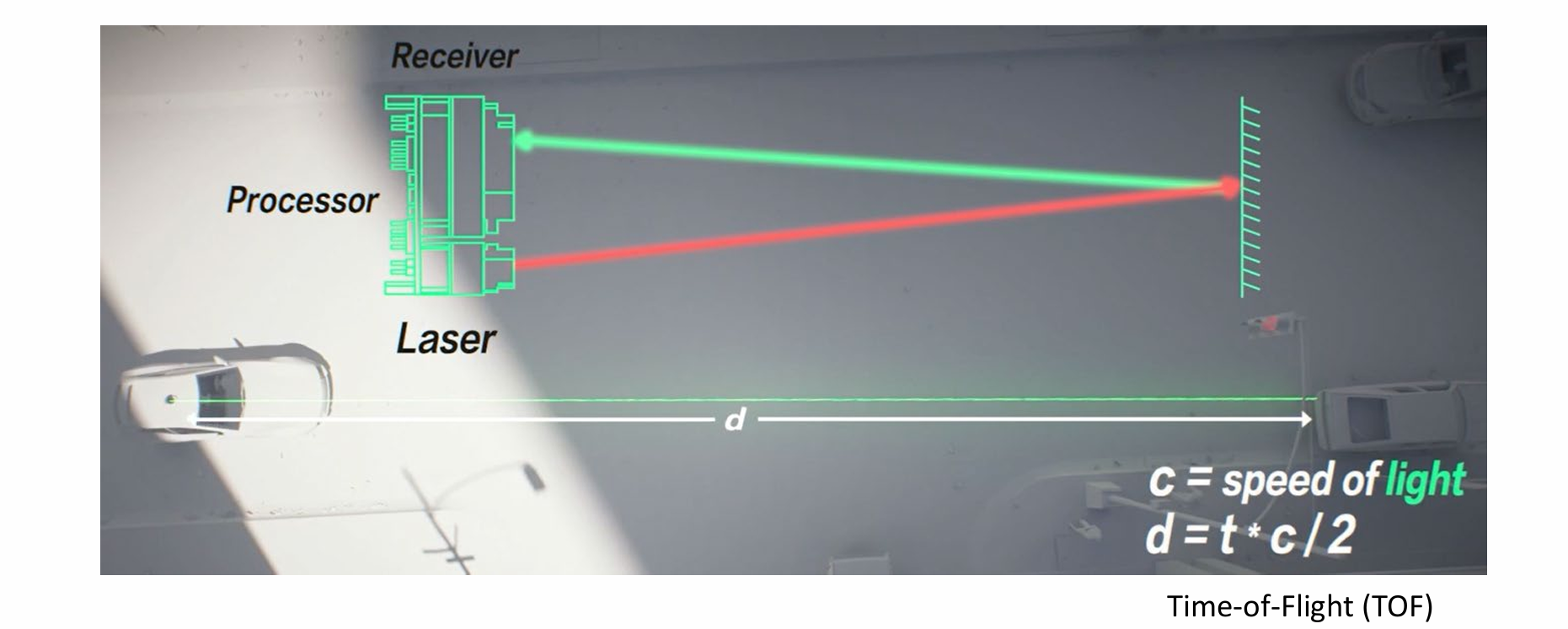
激光雷达LiDAR – Light Detection and Ranging2D LiDAR 2D LiDAR基本原理:(红色)激光打到 mirror 反射至物体后,(蓝色)激光经过 mirror 返回,计算时间差 3D LiDAR 3D LiDAR’s Needs:无人驾驶技术 测距原理:ToF Mechanical Spinning LiDAR 局限性: 点分辨率受限于阵列上的激光器 激光器阵列的校准在大规模生产中面临困难 系统设计与维护存在挑战