智能机器人概论 04 惯性传感器
惯性传感器
惯性传感器Inertial Sensors
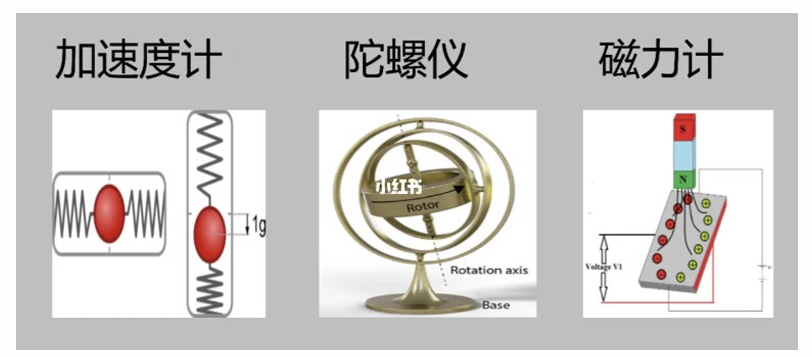
陀螺仪Gyro:测量角运动(角速度)
加速度计Accelerometer:测量线加速度
磁力计Compass:测量磁场方位
惯性导航系统INS/惯性测量单元IMU:组合惯性传感器,测量载体的位姿
应用:动捕系统,视觉动捕系统在运动幅度过大时不再适用,而惯性运动捕捉系统则可以根据惯性恢复动作(假设刚体)
惯性传感器的问题:测量加速度和力时,每帧误差累积,时间长误差累计高
陀螺仪(Gyroscope/Gyro)
陀螺仪:测量角运动(角速度)的惯性传感器,用于精密测量的陀螺仪,精度是他的一项重要性能指标
陀螺仪累计误差:角速度测量值,经积分得到角度变化,与真实值的差为累计误差
陀螺漂移Gyro drift:累计误差随时间而增大,称为陀螺漂移
漂移率ε(单位:度/小时):每小时的积累误差
主要误差来源:
- 干扰力矩,引起陀螺仪漂移误差的有害力矩
- 干扰力矩越大,陀螺仪的精度越低
- 在精度不高的转子式陀螺仪中,主要干扰力矩来自框架轴承内的摩擦力矩,及由陀螺仪中心与框架中心不重合和陀螺马达的动不平衡等原因
加速度计(Accelerometer)
加速度计:测量线加速度的惯性传感器
加速度的计算需要补偿重力加速度的影响:
- 实际应用的加速度计具有一个通过弹性或限动装置与壳体连接的质量。通常只允许质量有一维的自由度,限动装置的标定则提供了在自由坐标方向引起变形的比力分量的量度
- 比力是合力:F = m (G –a)
- 加速度计算中能否补偿重力加速度的影响是关键
加速度计的问题:
- 无法精确补偿重力加速度导致的零位偏差Acceleration bias
- 高频抖动数值不稳定带来的零位不稳
加速度计的主要参数:
- 灵敏度:能够引起力矩器中的电流发生确切变化的最小比
- 零位不稳性:【不稳】往往指在没有外力输入时的加速度计输出。其统计的均值称为【零位偏值】,方差部分称为【零位不稳性】
惯性导航原理
依靠系统内正交坐标系配置的陀螺仪和加速度计,感应载体的运动信息,通过计算确定载体的位置和姿态
惯性导航是以测量运动物体的加速度、角速度为基础的导航定位方法,经过积分得到速度、位置和角度
这种不依赖于外界信息,只靠载体本身的惯性测量来完成导航任务的技术称做惯性导航
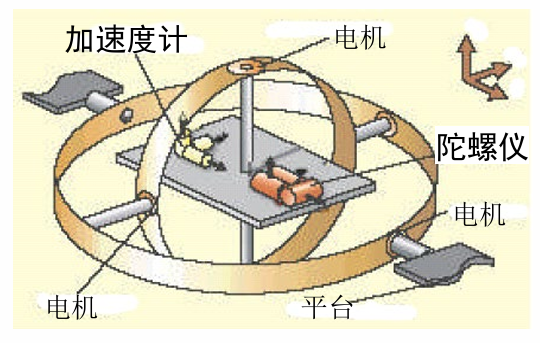
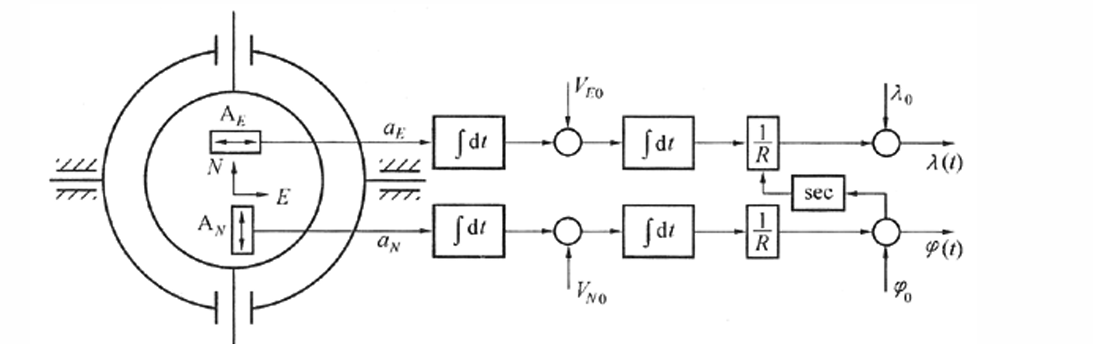
简化的惯性导航:稳定平台上放置两个加速度计AE、AN
- AE的功能: 测量沿东西向加速度,输出加速度aE
- AN的功能: 测量沿南北向加速度,输出加速度aN
稳定平台的功能: 在整个航行过程中,使AE及AN的敏感轴始终在东西和南北连线上,且保持在当地水平面内
捷联式惯性导航系统
- 通常把系统中完成平台作用的计算机部分称作计算机平台或数字平台,实质上是存储在计算机中的方向余弦矩阵
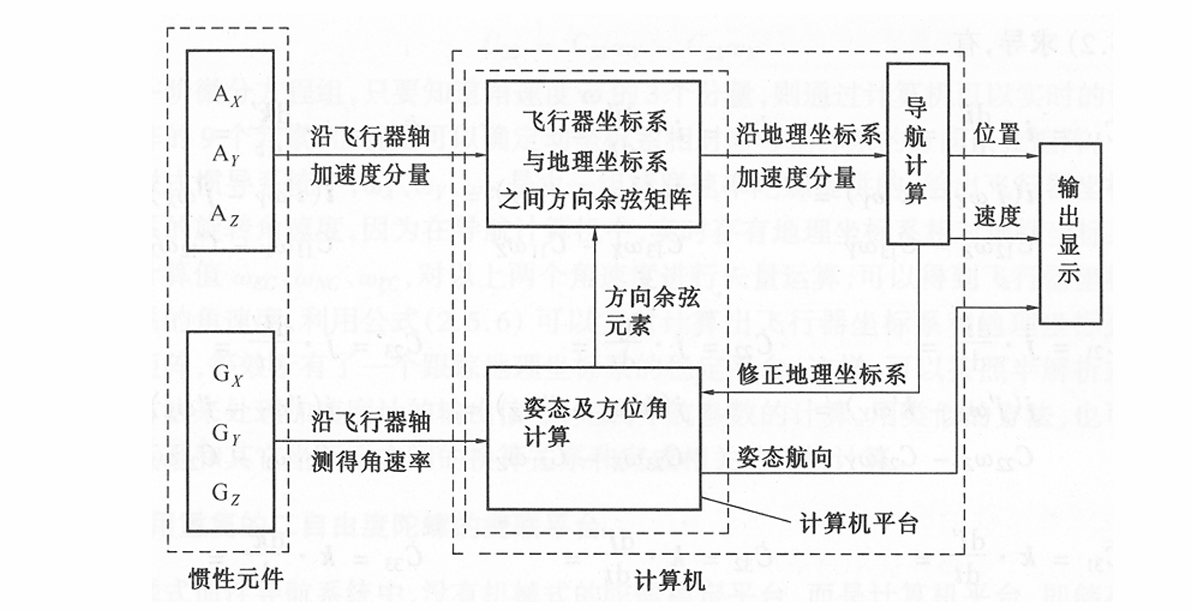
- 问题:例如发动机等载体本身震动带来的影响
惯性测量单元(Inertial Measurement Unit, IMU)
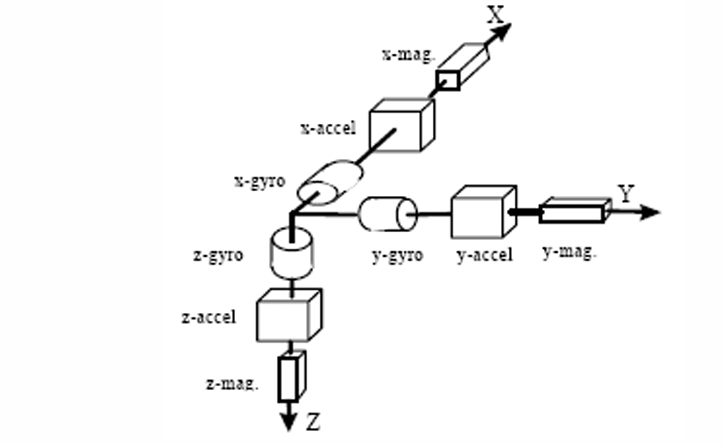
惯性测量单元是利用在系统内正交坐标系配置的陀螺仪和加速度计,测量物体三轴姿态角(或角速率)以及加速度的装置
IMU 三个方向都分别有磁力计和加速度计
惯性测量是不依赖于外界信息,仅利用惯性原理来测量加速度、角速度,在此基础上估计载体位置和姿态的方法
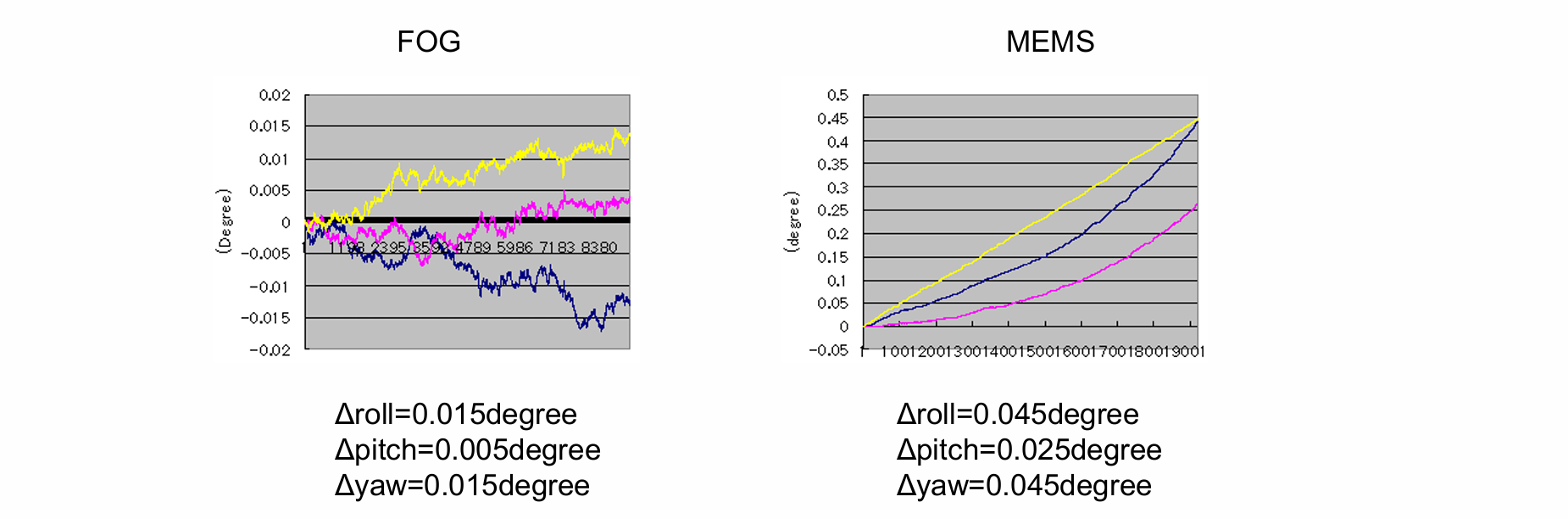
理论上IMU可解算并输出载体的位置,然而MEMS IMU的精度低,位置值不可信