
智能机器人概论 02 机器人传感器
机器人传感器系统
传感器与执行机构
输入:传感器
内部传感器、内部执行器:保证机器人的稳定运行
外部传感器、外部执行器:决定了机器人的功能、类型及规划控制方法
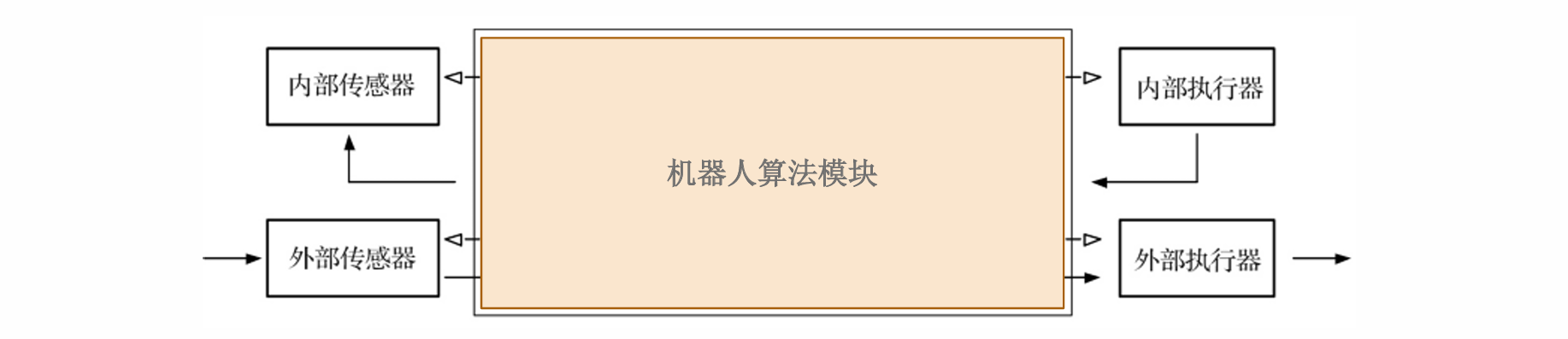
内部传感器:感知机器人自身状态,典型的内部传感器有编码器、IMU、电流传感器、力/扭矩传感器等等
外部传感器:感知外部环境与环境的交互,典型的外部传感器有摄像头、LiDAR、麦克风、超声波
内部传感器
- 内部传感器:感知“自我”,回答机器人自己处于什么状态、位置、方向、…
外部传感器
- 外部传感器:感知“世界”,回答机器人周围的环境是什么样的
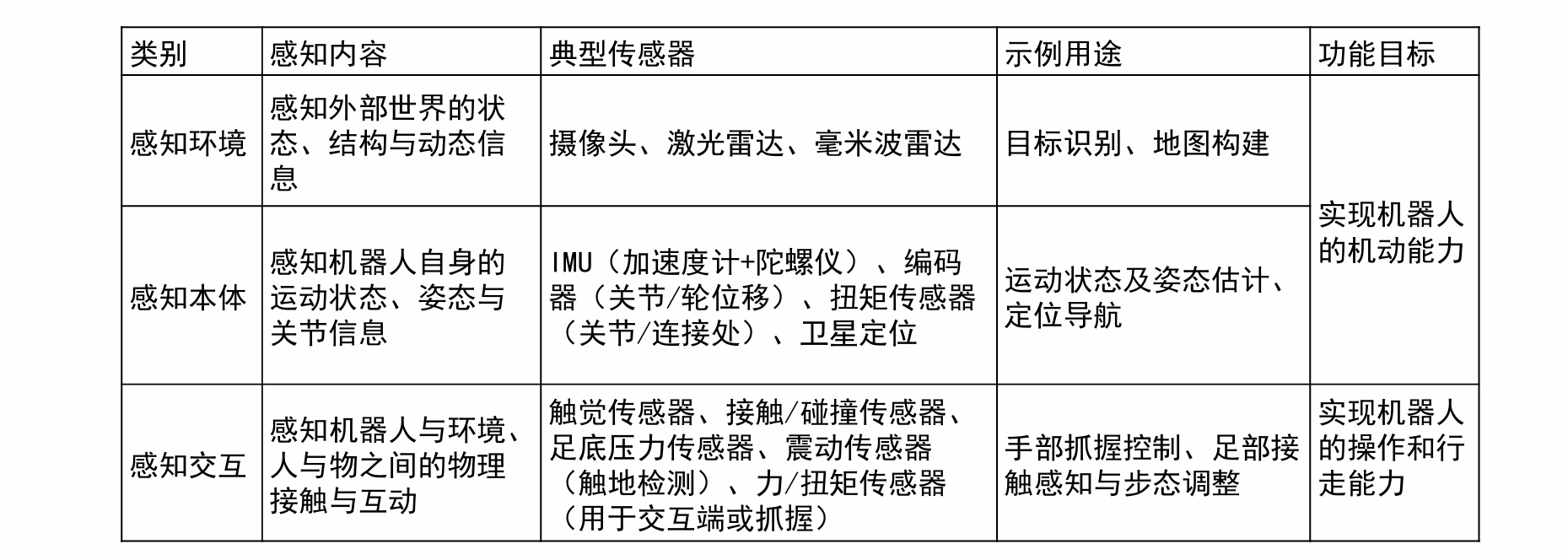
基于功能的传感器分类
- 传感器基于功能可以分成三类:感知环境你、感知本体、感知交互
传感器原理介绍
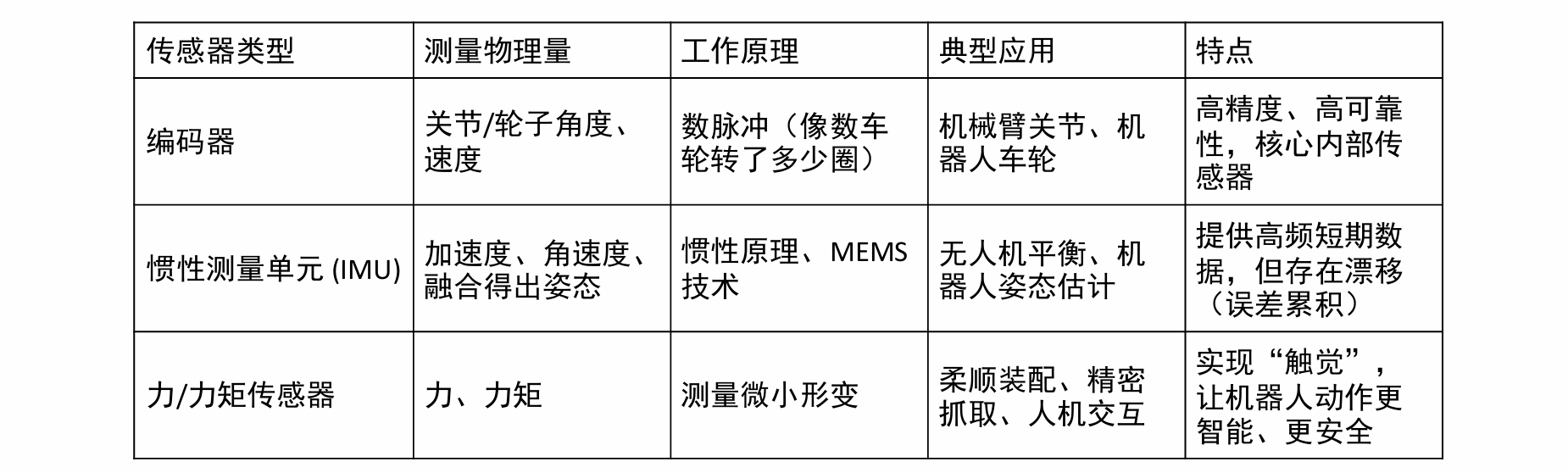
内部传感器(感知本体):运动及位姿估计
- 编码器(关节\轮位移)
- 惯性传感器(加速度计、陀螺仪)、惯性测量单元IMU
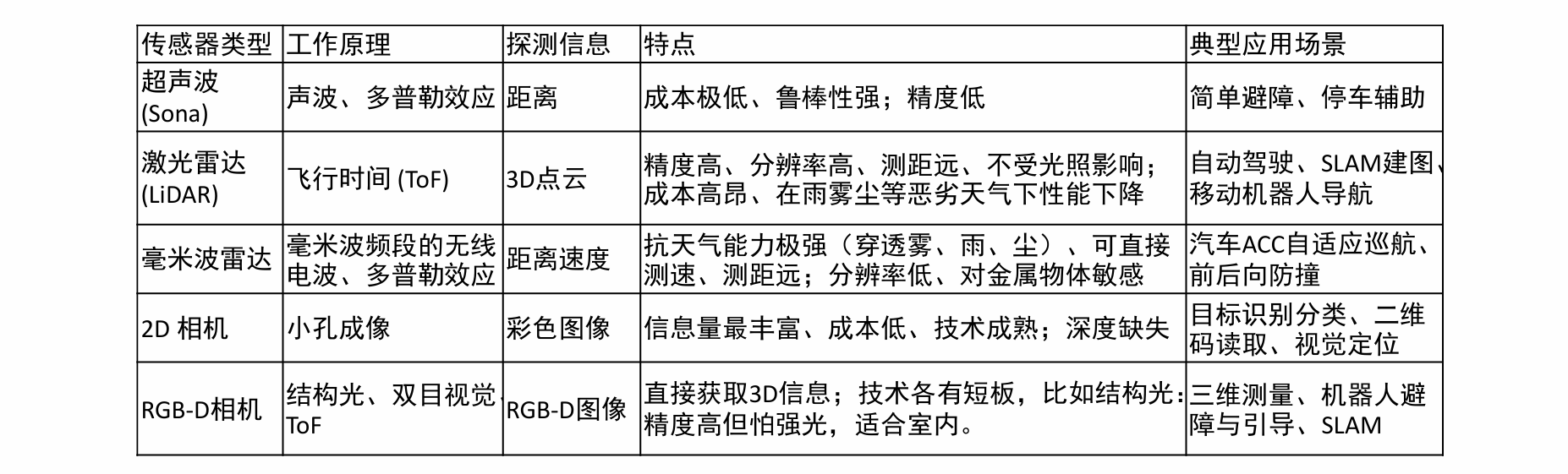
外部传感器(感知环境):环境感知建模
- 视觉传感器:2D相机、RGB-D
- 距离传感器:激光雷达、毫米波雷达

