生成模型基础 02 Autoencoders
Autoencoders
Basics
What is autoencoder?
autoencoder 是一种前馈神经网络,其功能是接收输入x并预测x
存在 Trivial (short-cut) solutions:神经网络可以学会恒等映射 𝑥 = 𝑓(𝑥),即输入为x,经过中间的神经网络后,输出也为x
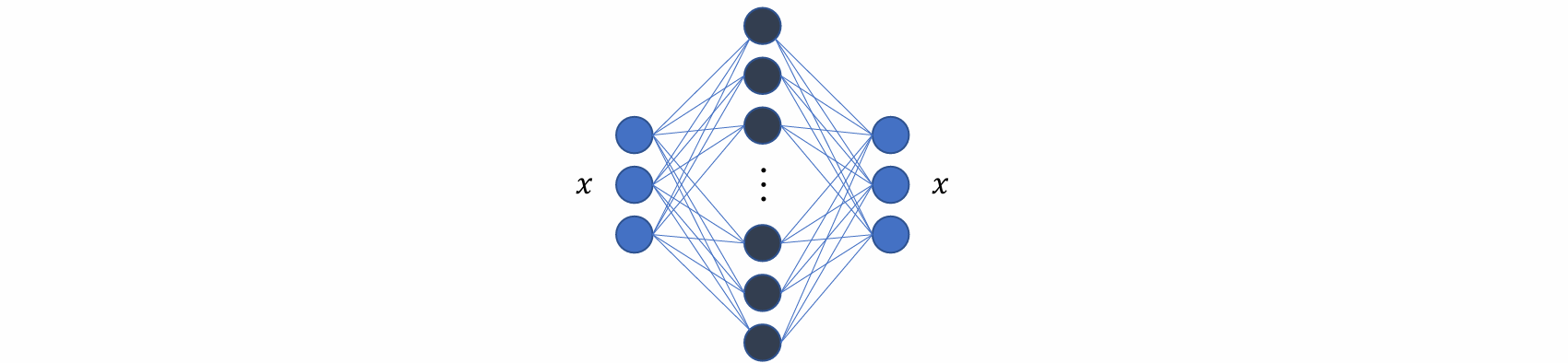
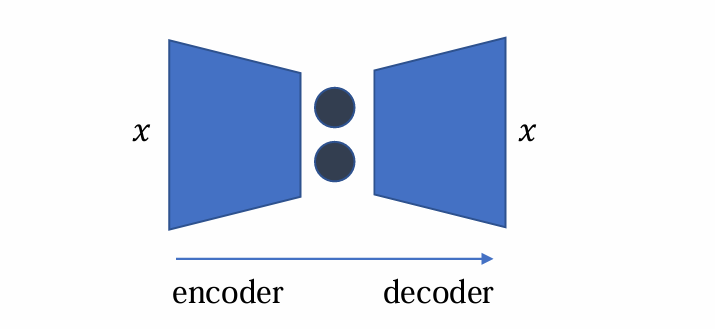
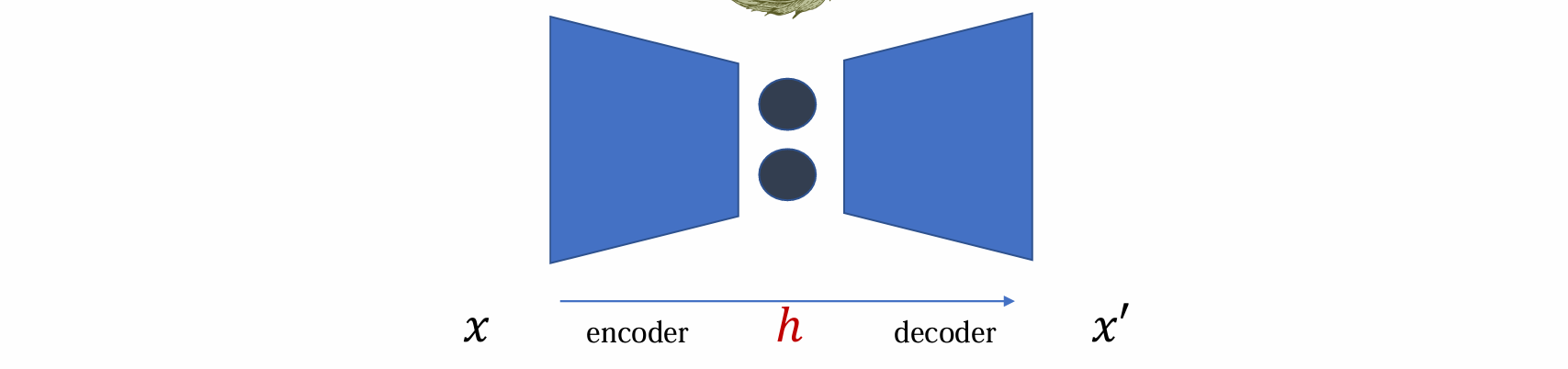
- Bottleneck architecture:

使用bottle neck结构:防止过拟合
可以分为encoder(编码、降维、提取特征)和decoder(解码、复原重构x)
Why autoencoder?
将高维数据映射至二维空间以实现可视化
数据压缩(降低通信成本)
无监督学习(预训练),通过加入扰动再去噪
生成模型,生成image
The simplest autoencoder(线性autoencoder)
最简结构的autoencoder包含单个具有linear activations的hidden layer
encoder通过线性投影到更小的空间,而decoder则通过线性投影还原到原来的维度,均为线性变化

具体而言x通过线性变换由dx1变成kx1,变为隐层h实现encoder。h通过线性变换由kx1复原dx1变成输出output实现decoder
Note:
- 这个网络是线性的
- 通常设置k << d,如果k = d则可以使得VU = 1 从而为恒等变化而变得没有意义
- 当 𝑘 ≪ 𝑑 时,实际上是对数据 𝑥 进行降维
优化目标:如何复原还原成output?output = VUx
如何确定V和U?可以考察 output 和 x 的 p 范数

这时,encoder就相当于主成分分析(PCA),可以通过最小二乘法求解
Note:
- 解不唯一:若 𝑈∗ 和 𝑉∗ 构成一组解,则 𝑈∗ × 2 与 𝑉∗/2 同样构成有效解
- 无需通过gradient descent求解该问题,存在closed-form 解,即通过有限次的标准运算和函数明确表达的解
autoencoder为什么要先encode降维再decode升维:先降维再升维的核心目的,是施加一种“信息瓶颈”(类似于主成分分析PCA),强迫网络只能选择性地通过最重要的信息,从而抛弃冗余和噪声,学习到数据的本质结构。如果不经过这个瓶颈,网络最简单的做法就是直接复制输入(恒等映射),这就完全失去了学习意义
More about autoencoder
Autoencoder 通常可表述为 𝑓(𝑔(𝑥)) = x 的数学形式:
- g函数是encoder
- f函数是decoder
- h = g(x)被称为 x 的 code / representation / latent variable
f 和 g 不应该过于复杂或者拟合能力过强:
- 避免学习copy(encoder) 和 paste(decoder)
- 避免过拟合
f 和 g 可以是浅层的神经网络:所有的参数可以通过梯度下降训练
Autoencoders 是可学习的以及 data-specific:
- 这与 mp3 或者 jpeg 等压缩方法不同
- autoencoder是数据相关的,在”cat images”上训练的autoencoder,在”dog images”上可能表现失效
Vanilla autoencoder is not a generative model
标准Autoencoder:它不是一个合格的“生成模型”,由于其训练目标是让输出 $\hat{x}$ 无限接近输入 $x$,它的中间隐藏层(latent representation)确实学到了数据 $x$ 的本质特征,但是隐藏层中的分布是“混乱的”和“未知的”
x 虽然服从数据分布但是数据分布是未知的,且不好假设的
而生成模型的定义为通过从 noise 中生成,得到去噪的结果,因此虽然AE可以压缩和解压缩,但是其没有涉及到随机分布、概率,且其分布不是可控、可建模的
- 若训练完成后 ℎ 服从已知分布(如 standard Gaussian distribution),则将达到理想状态,可以用作生成模型
How to modify an autoencoder into a generative model?
- 当encoder被替换为random noise时,decoder即转变为generative model
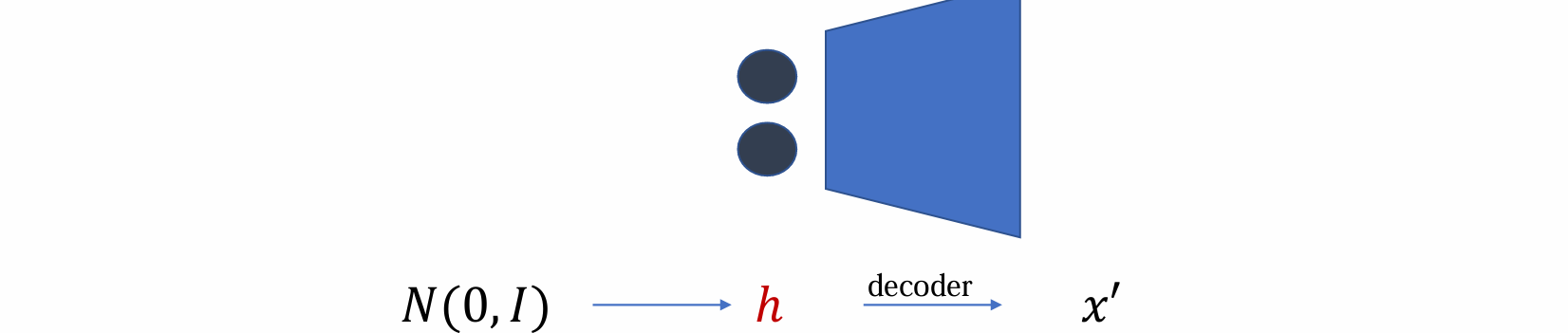
若保证h是已知(e.g.高斯噪音)则可去掉 encoder ,只用 decoder 作为生成模型
关键:如何使 h 在训练后变为已知分布?
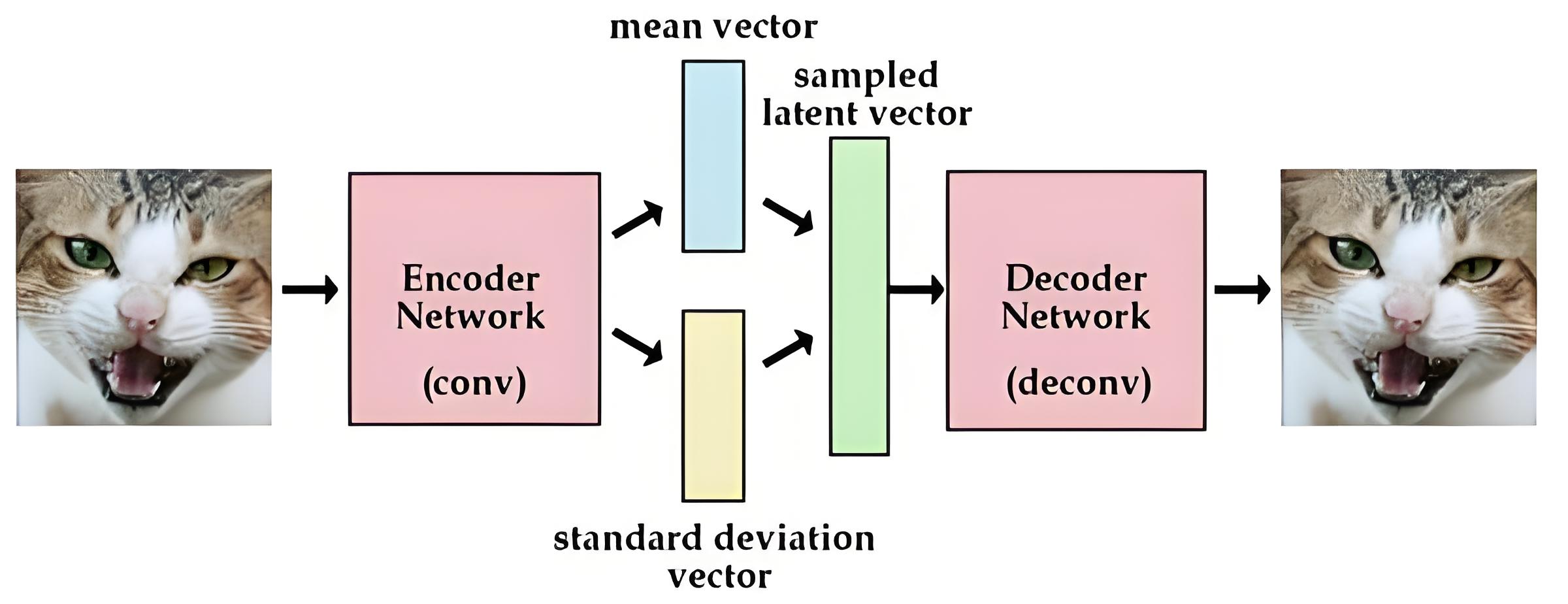
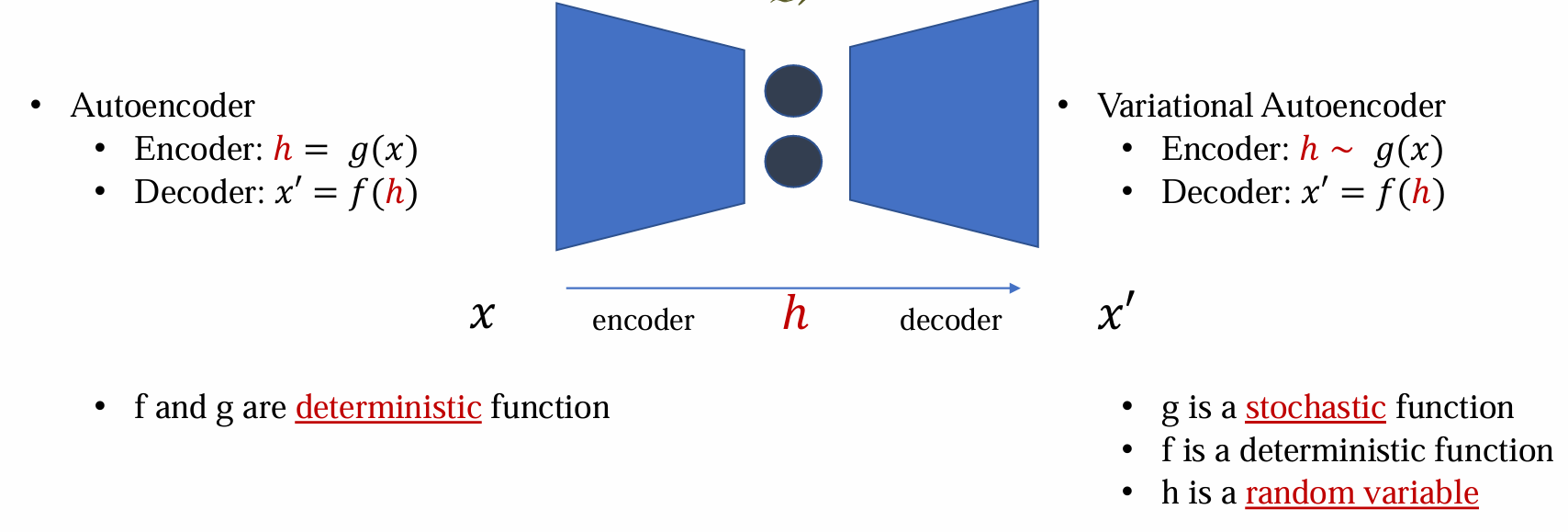
Stochastic latent representation
- 在随机隐层表示中,h 是有随机性的随机变量,服从 g(x) 分布,而不是一个确定的值
给出 x 后,神经网络的一部分生成均值,另一部分生成方差,根据均值和方差构建高斯分布
用神经网络构建的均值和方差都是可训练的参数

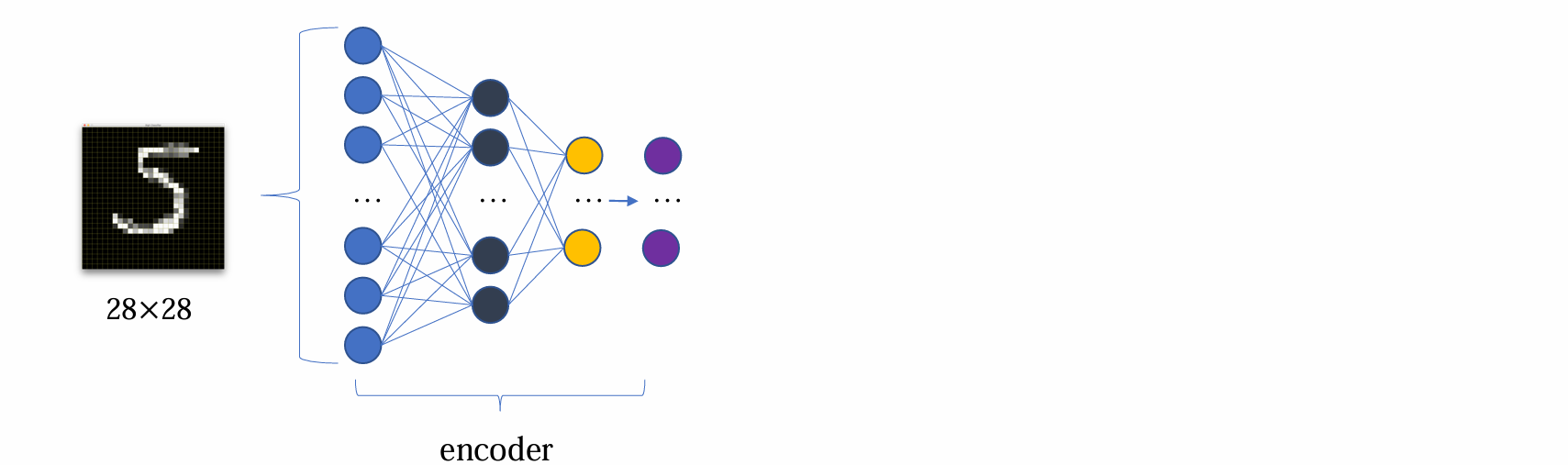
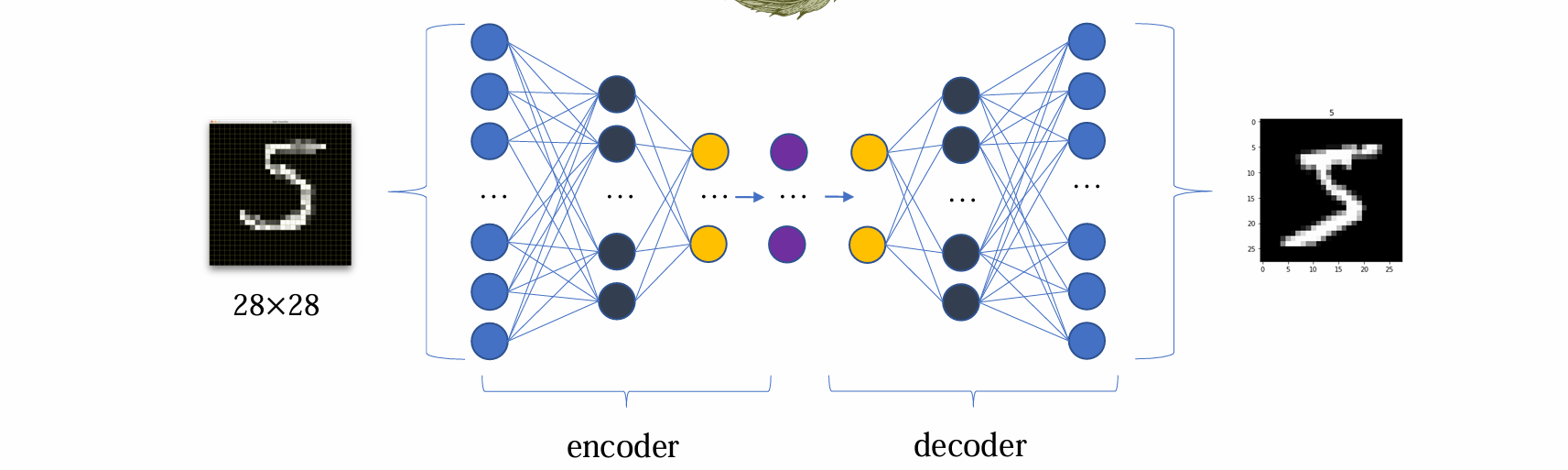
Examples
在 mnist 的例子中,第一个 hidden layer 有256维,通过 encoder 后变为100维得到第二个 hidden layer
在第二个 hidden layer中:
- 50维用来预测均值
- 另外50维用来预测方差
从而得到可学习的均值和方差,然后再通过这个均值和方差构建高斯分布
1 | # encoder(incomplete) |
1 | # decoder(incomplete) |
encoder与decoder不一定具有对称性
encoder与decoder不一定必须是MLP(多层感知机)
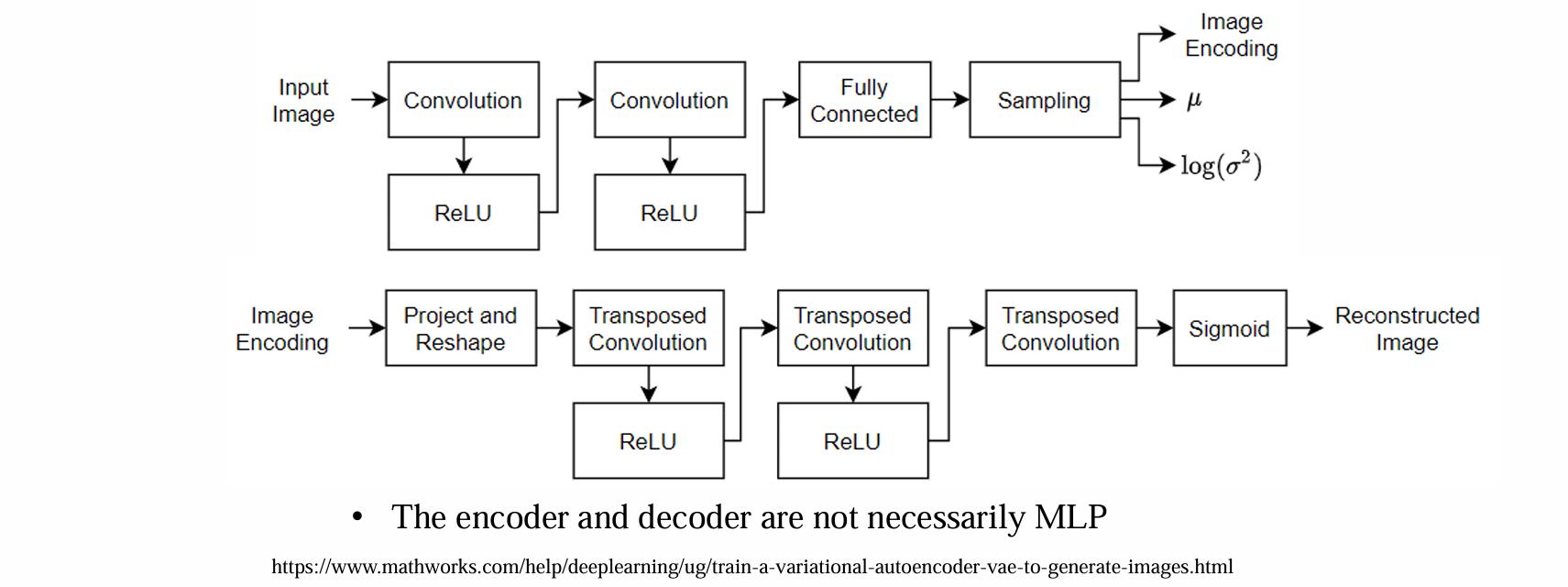
encoder的作用是得到可训练参数(均值、方差)的估计,decoder的作用是得到重构的image
问题:如何train?如何得到可估计的均值、方差?
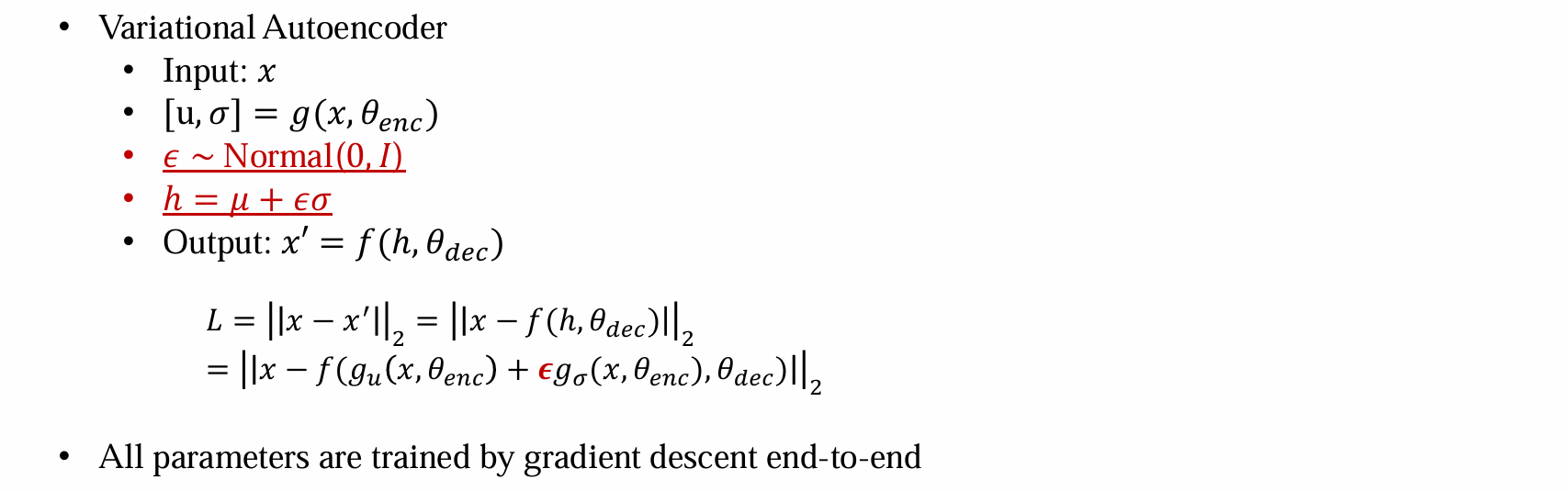
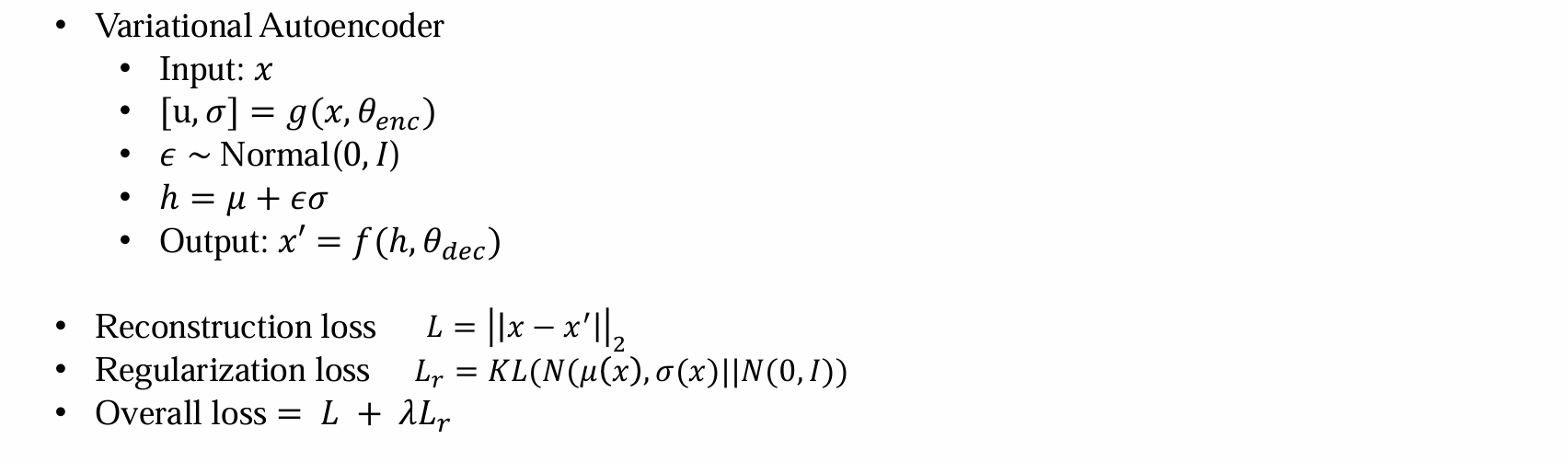
Variational Autoencoder
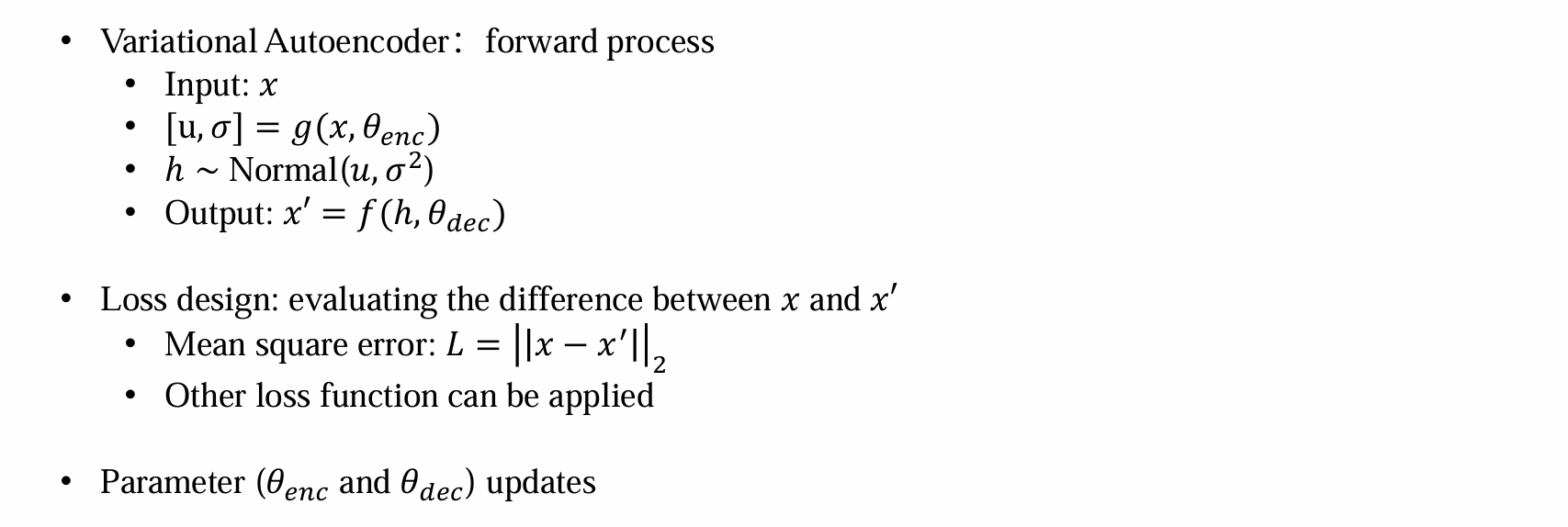
Training VAE
- pipeline:
- 输入:x
- 通过encoder得到均值方差的估计,根据均值方差的估计得到分布函数
- 根据分布函数采样h
- 通过decoder得到重构后的output,并优化x和output的距离
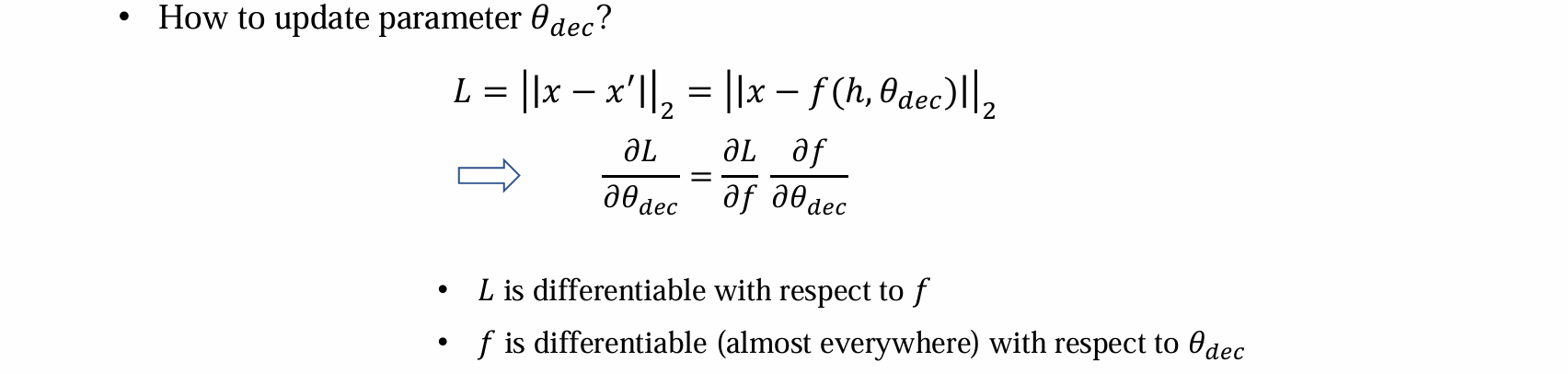
- decoder参数的更新可以通过梯度的反向传播完成(都可以通过链式法则求导得到):
- encoder参数的更新无法通过梯度的反向传播完成,因为h~g(x)是采样过程,不可导,导致不可训练:
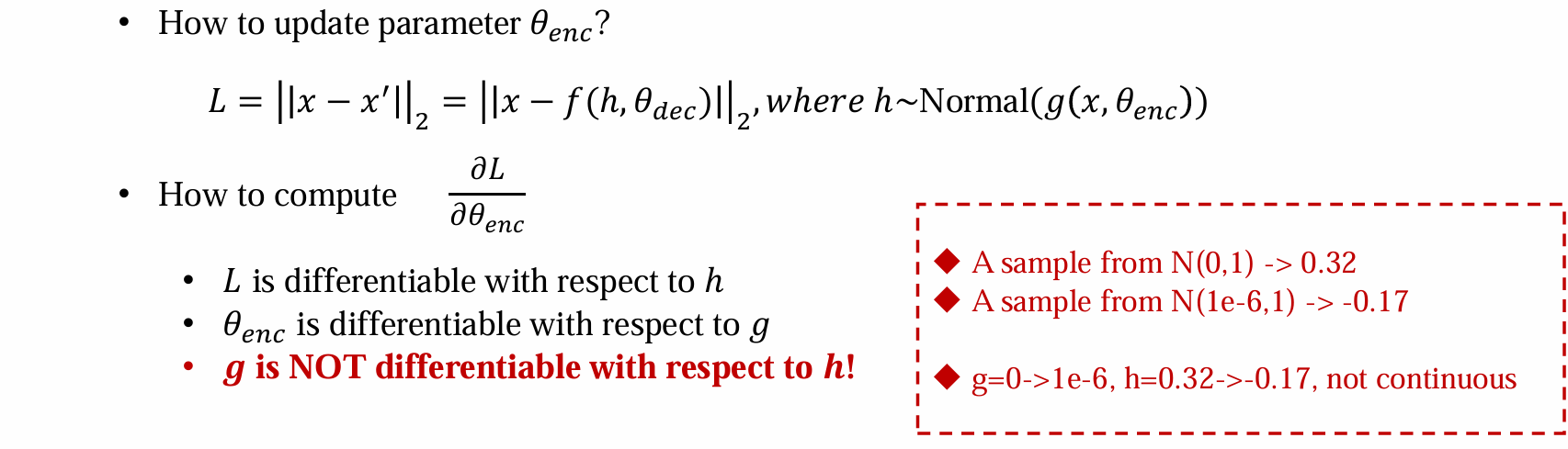
- VAE 的解决方法:Reparameterization trick(重参数化)
Key tech: Reparameterization trick(重参数化)
问题:采样过程是不可导的
解决方法:Reparameterization trick,将先 rescale 后 sample 变成先 sample 后 rescale,这个变化过程是完全等价的
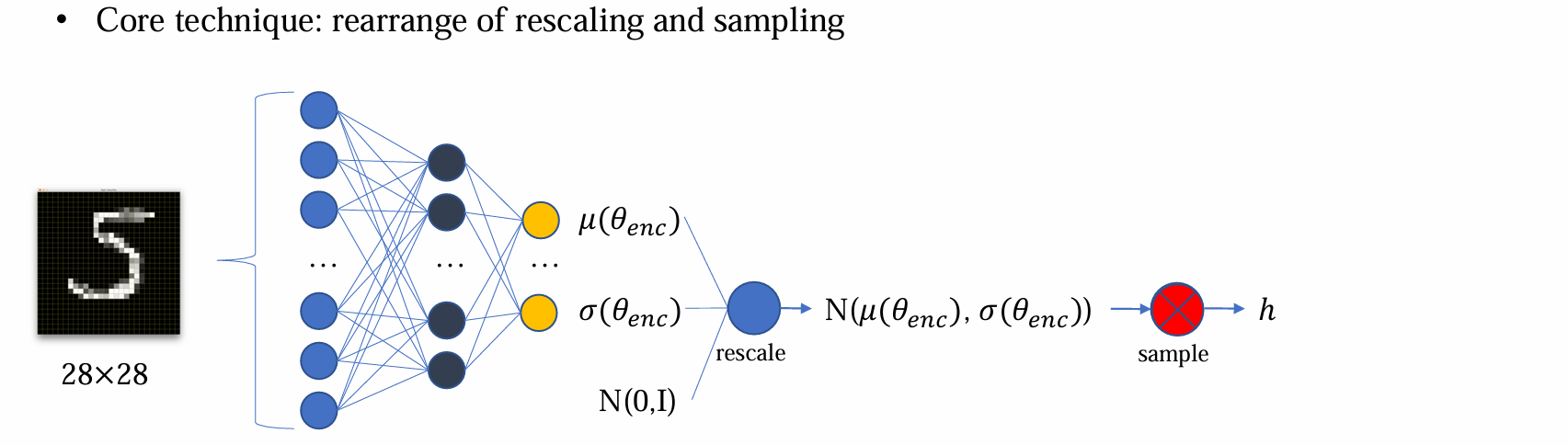
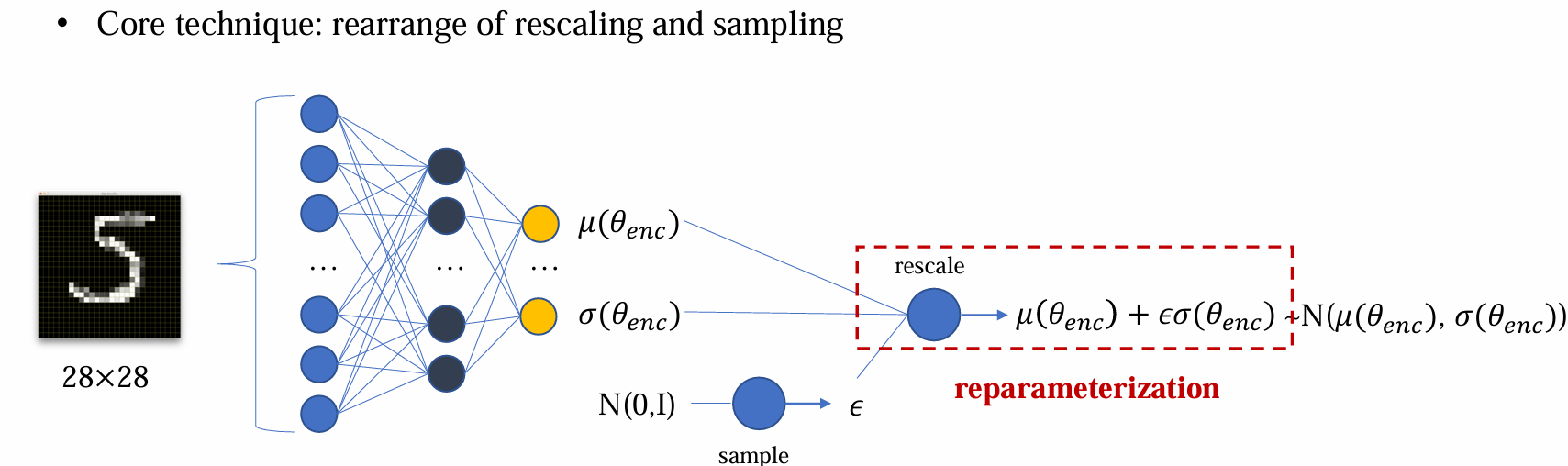
- 此时导数不会传到 epsilon 之前,整个过程都是可导的,可以训练均值和方差
1 | # VAE:implementation |
问题:如何在训练后使 h 服从已知分布?
解决方法:设计regulation loss
- 防止过拟合
- 迫使编码器输出的潜在变量分布 q(z∣x) 逼近标准高斯分布 N(0,I)
- summary:
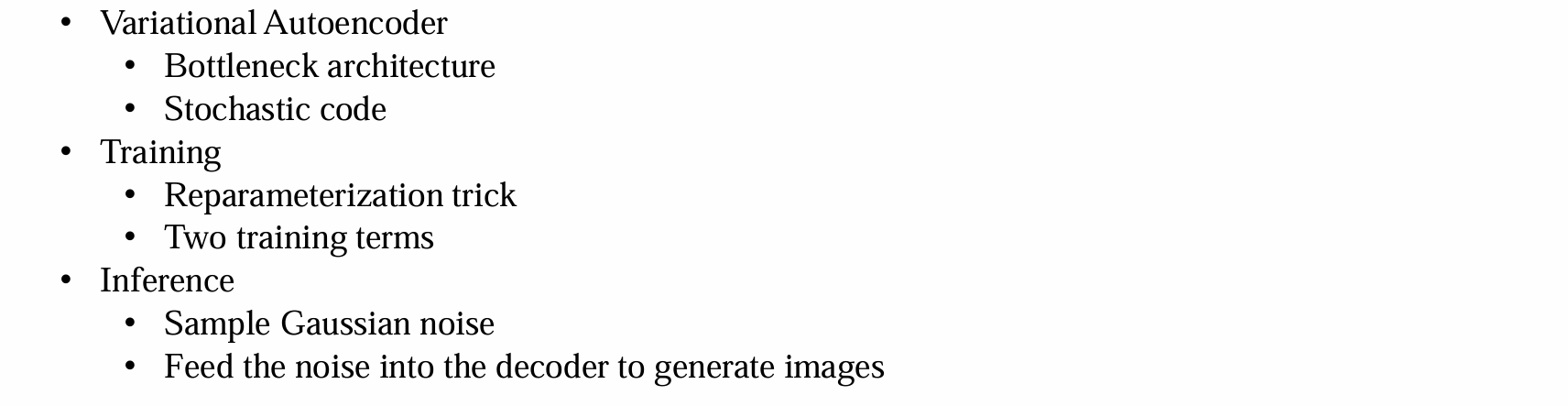
- 作为生成模型的时候,目的是从噪声恢复Image,因此只要 decoder
Probabilistic view of VAE(重点、必考)
问题:variational体现在哪儿
假设:data分布是存在且固定的,但是是未知的(e.g. 假设独立同分布)
VAE假设数据生成的过程:对于任何Image x,都有latent code z(e.g. 可以类比b站视频的分类标签)

latent code z 对于生成数据 x 有引导作用
latent code 未知,但是假设存在,可能无法解读
z 比 x 的 dim 小得多,可以容易得建模出 lantent code的分布
假设 z 服从分布 p(z),称为:prior distribution
数据生成过程:假设p(z)已知,采样得到 zi,zi引导生成 x,得到xi,从而构建数据集 D = {xi}

问题:可以假设z为任意分布,已知p(z)、D,如何求解p(x|z)
利用最大似然估计可得:

问题:没有方法可以对p(x)显式建模
最大似然估计的本质:最优的参数实质是最大化得到数据的概率p(x)

问题:神经网络过于复杂,无法进行估计(涉及高维积分和非线性函数)
根据显然事实假设:
- 对于任意给定的 𝑧,在域 𝑋 中仅有小范围区域的点具有非零的 𝑝(x|z),latent code 对应的数据 data 只有很少一部分符合
- 假设我们有另一个函数/分布 𝑞𝜃2(z|x),该函数/分布能够定位该区域,即给出x,可以推算出可能的z
函数/分布 𝑞𝜃2(z|x)被称为:Variational posterior distribution(变分后验分布)
等价化简过程:

- 可以将log P(x) 化简为一下两部分之和:
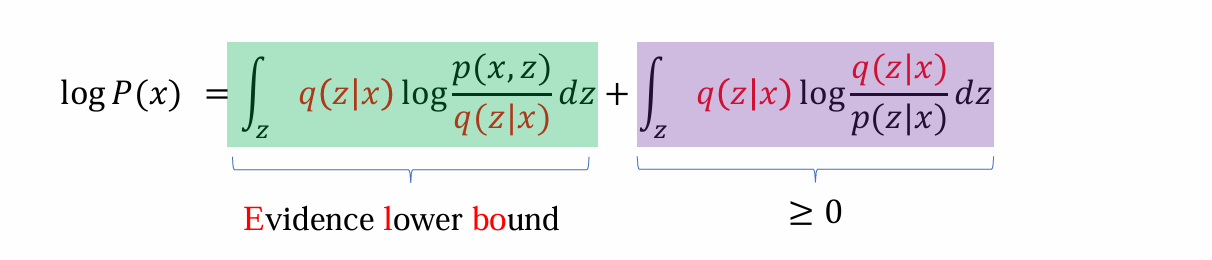
由于后面的式子显然≥0,因而前面的式子是log P(x)的lower bound 称之为:Evidence lower bound
虽然无法maximize log P(x),但是由于Elbo是其下限,因而可以maximize Elbo,从而变相完成maximize log P(x)
将Elbo作为优化目标,进一步化简可得:
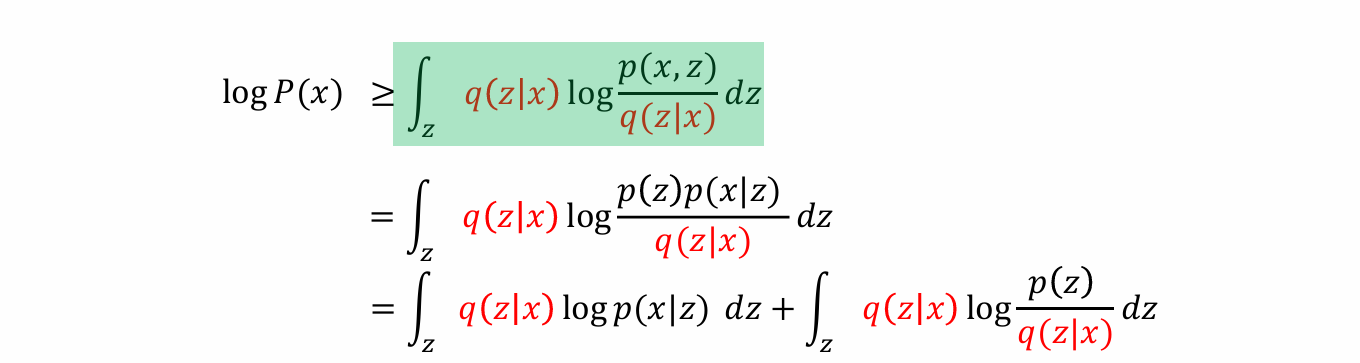
- 可知log P(x)的下限可以由两部分相加得到:

前面的式子:将q作为encoder,p作为decoder则说明能够还原出x的概率,某种程度等价于x和x’的loss
后面的式子:形式上与KL散度相近,某种程度等价于regularization loss
Problems in VAE
VAE 通常难以实现深度化,只能是浅层网络
latent code 的维度较为敏感
VAE 无法进行概率密度估计,即无法精确计算 p(x)
VAE通常只用作系统中的一部分,不单独使用
Extension:Denoising autoencoder
- VAE 是在中间隐层 latent layer 中加入 noise,而 DAE 与之不同,是在 input 直接加入扰动
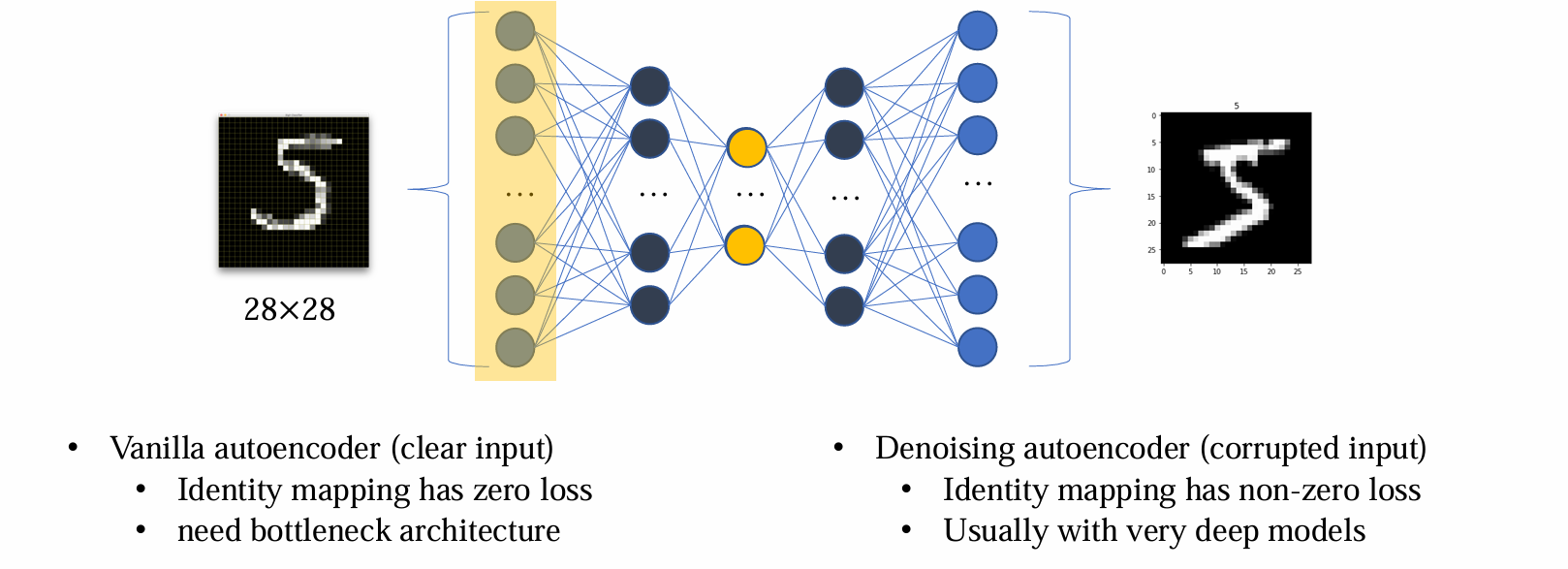
由于 DAE 不会发生过拟合问题,因而无需正则化。同时 DAE 没有显式区分 encoder 和 decoder
DAE 的实现流程:
- Input:x
- x’ = AddNoise(x)
- Output X’’ = f(x’ θmodel)
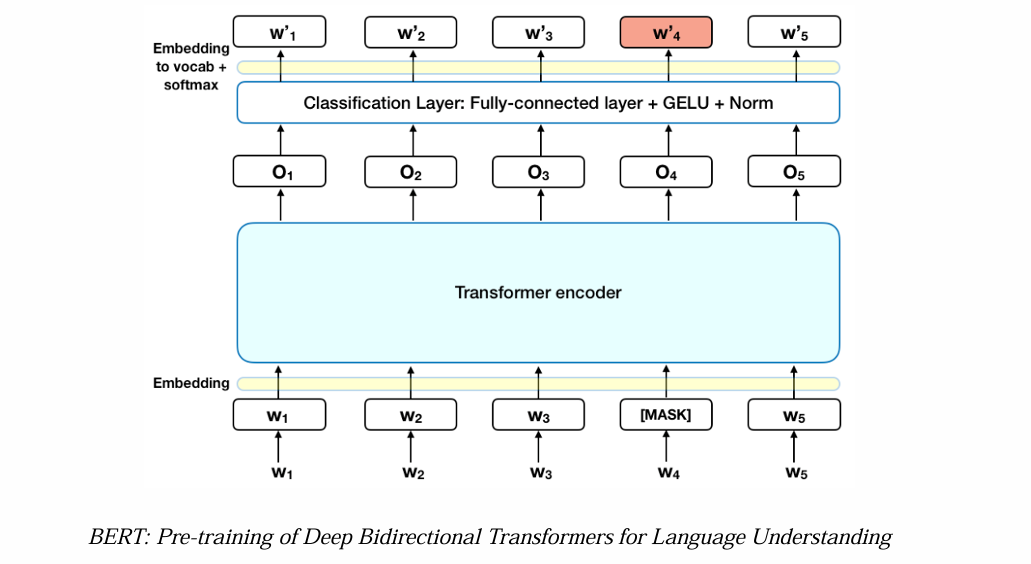
如何加入噪声:使用 Mask 方式
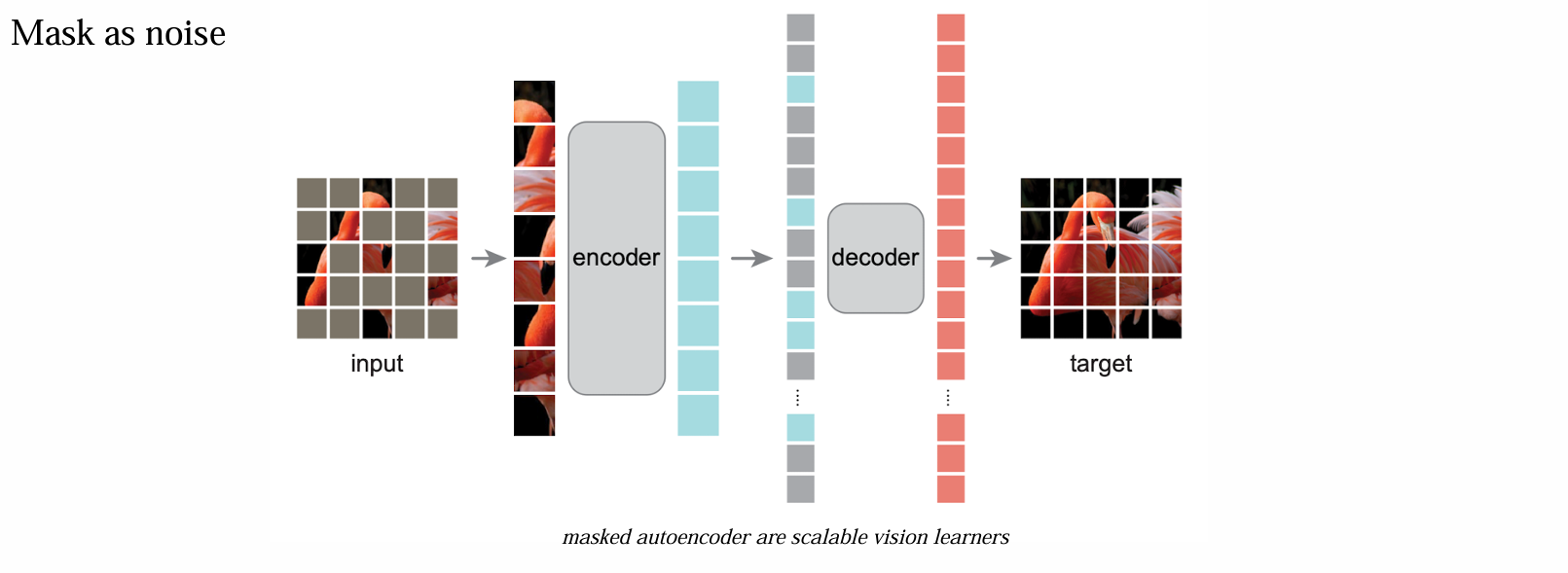
- 目标是复原 mask,一般 DAE 的 encoder 很深,而 decoder 较浅
- Denoising Autoencoder Summary:
- DAE 几乎是唯一的 pre-training 方法
- 标准化的加噪方式是采用 mask
- 不受 VAE 的限制,可以并有必要训练很大的模型
- 可以适用于任何形式的数据,只要能加噪即可
- 虽然有一定生成能力,但是为 conditional 的生成,因而通常不被认为是生成模型,无法进行从0到1的生成
Extension:Vector-quantized VAE
VQVAE 通常作为系统中的一部分,不作为单独的模型使用
VQVAE 常用于多模态模型的生成和理解
Motivation
本质动机:image 和 text 非常不同,但是大量场景需要二者同时出现。理解、生成任务需要将两种信号有机结合
language 是由 tokens 组成的,拥有以下特点:
- 有固定的词汇表,是有限的
- 长度很短
- 离散化
- 可以通过vectors呈现:one-hot vector 或者进行 word embedding 后映射为 real vector
image 是由 pixels 组成的,拥有以下特点:
- 没有词汇表
- 长度很长(e.g. 1024 x 1024)
- 可以被视为连续的(相邻像素间不会突变)
- 可以通过 RGB vectors 呈现
Goal of VQVAE
- 将图像处理为一系列 “word tokens” 序列,使其带有语义信息
- 如何为图像构建一个小的固定词汇表 vocabulary
- 如何定义序列的长度
- 如何将 RGB 值转换为 tokens
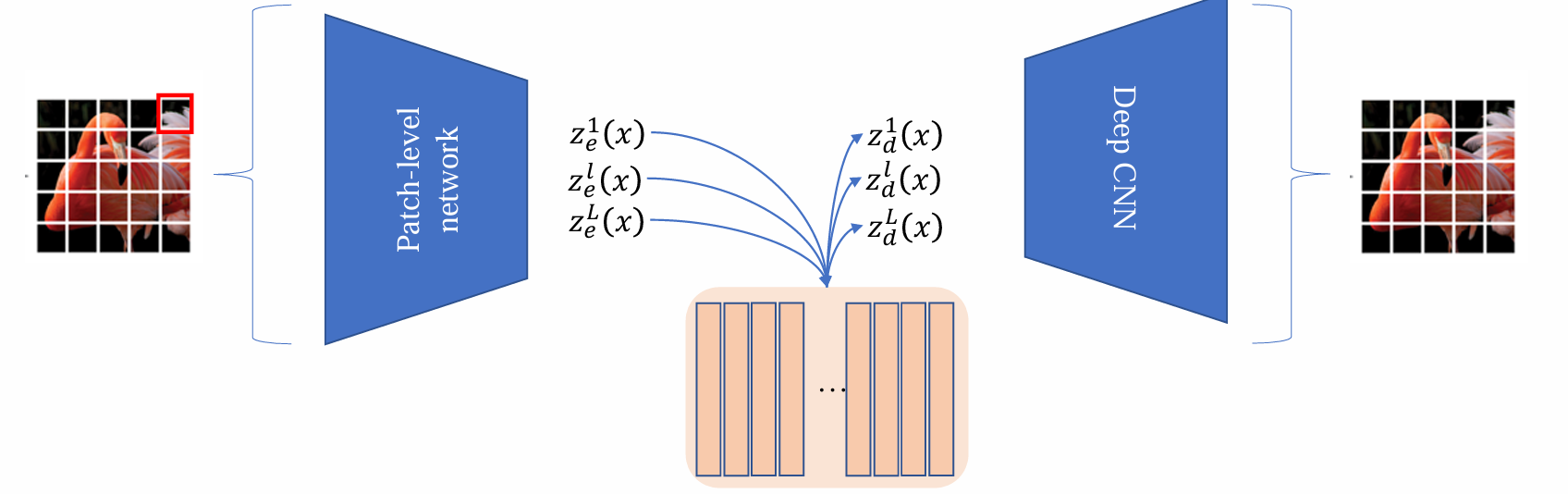
VQVAE model
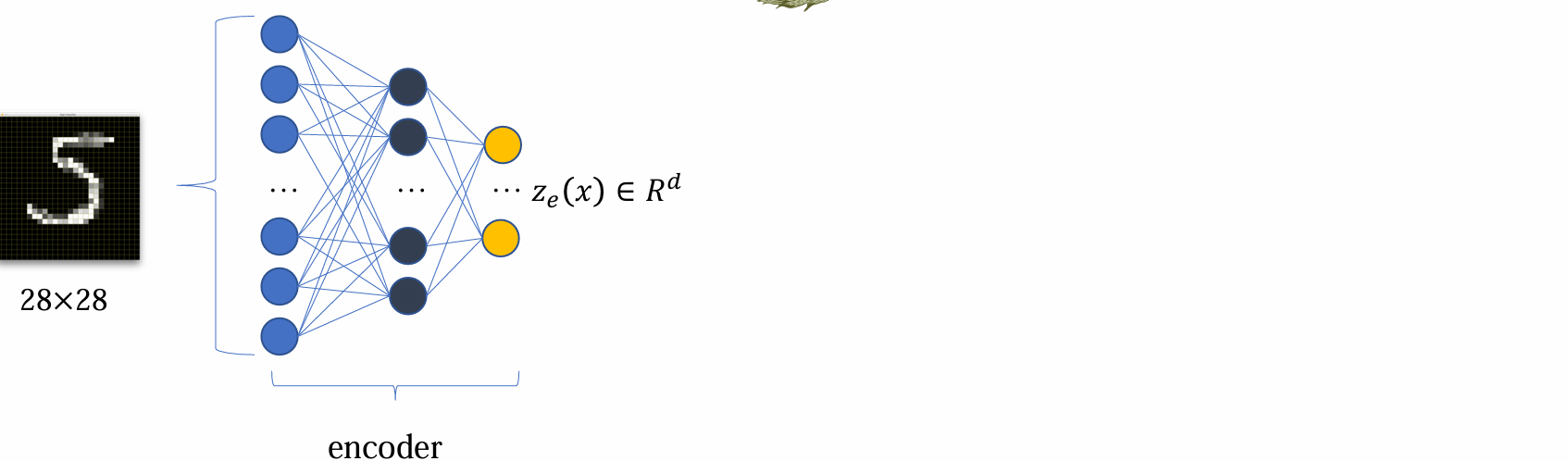
- encoder 得到ze(x) 后,希望能够变成离散化,有限的表达,这一步骤通过codebook查表得到:
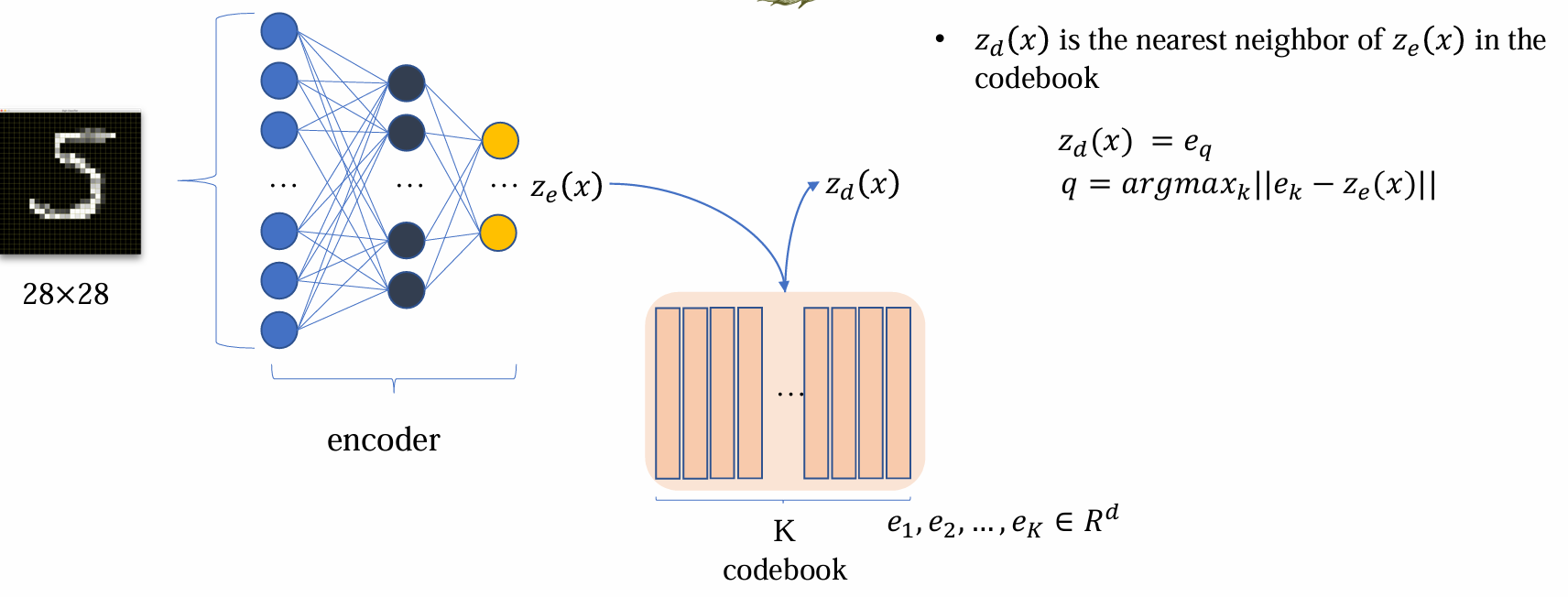
zd(x) 是 ze(x) 在 codebook 中的最近邻
不同于 VAE,VQVAE 的 latent 是查表后得到的
查表后得到的 zd(x) 为 decoder 的输入:
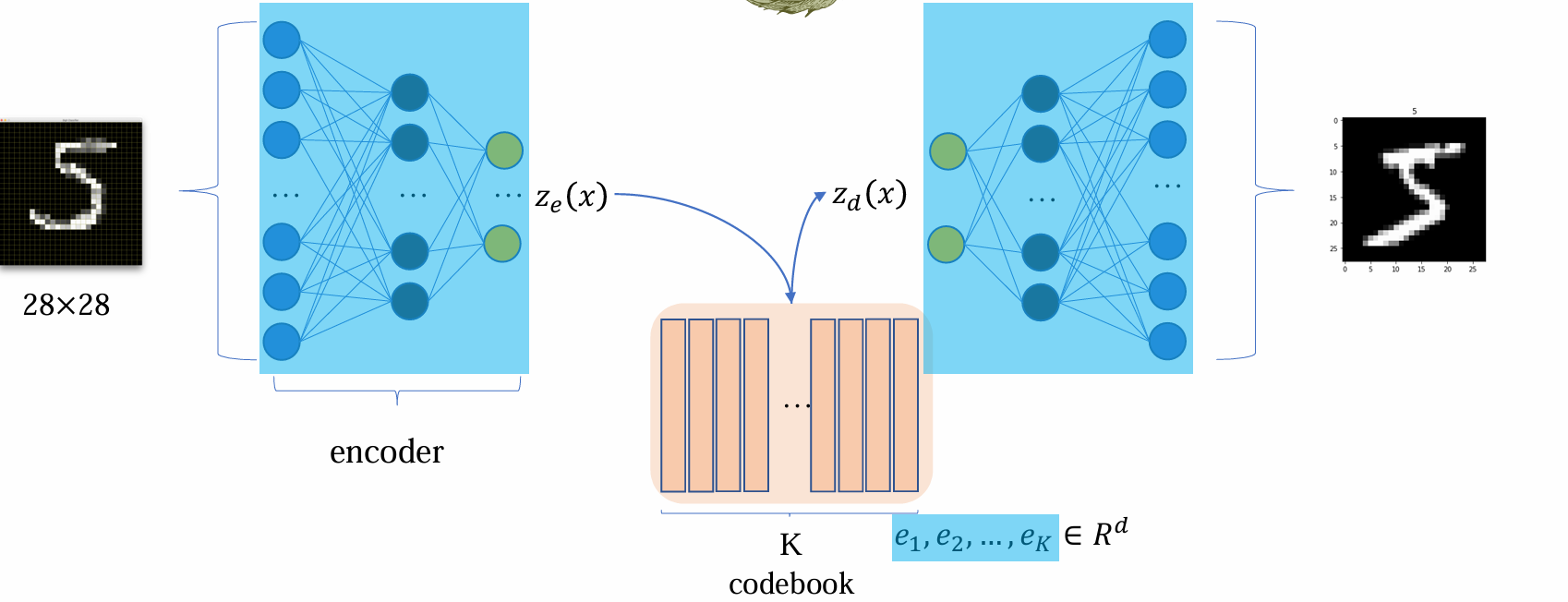
- 其中蓝色区域部分的参数是需要优化的,codebook 中的参数是需要优化的
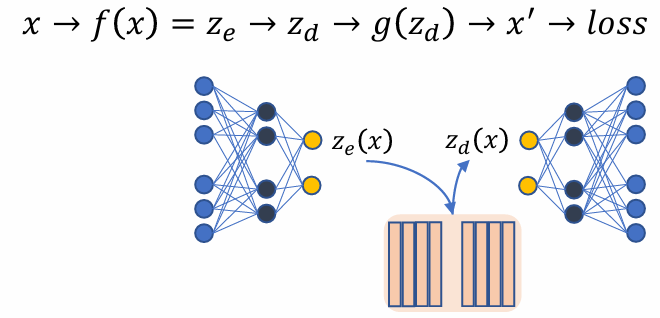
Gradient computation
- Gradient computation of encoder:
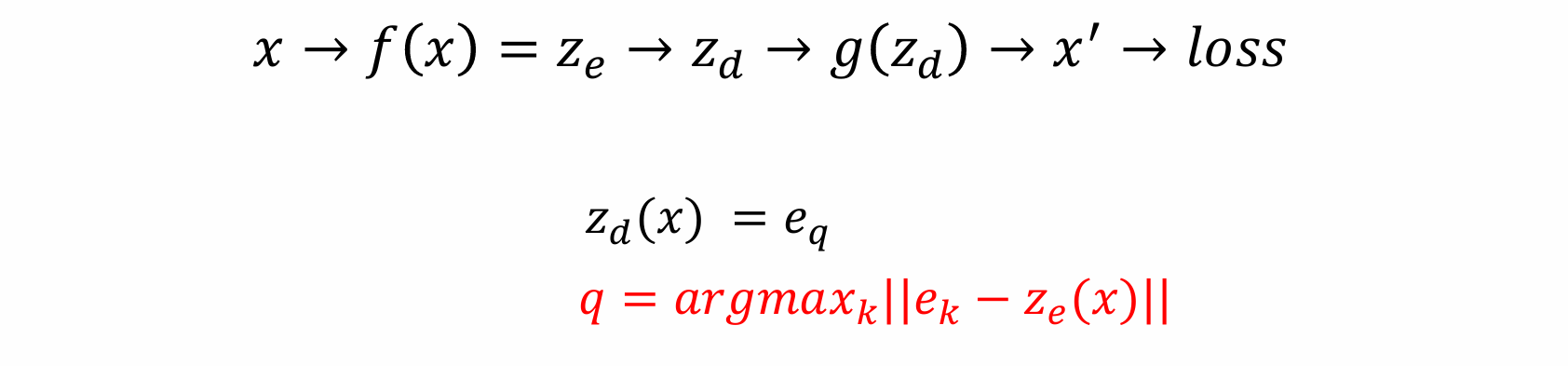
关键问题:codebook 无法计算梯度,codebook 的原理是求 argmax
- 若采用 |𝑥 − 𝑔(𝑧𝑑)| 作为损失函数 loss,编码器参数 encoder parameters 将无法更新
- 若采用 |𝑥 − 𝑔(𝑧𝑒)| 作为损失函数 loss,则优化目标 objective 已发生改变,梯度 gradient 不正确,所有参数 parameters 的梯度 grad 均错误
解决方法:设置 𝑧𝑑 = 𝑧𝑒 + StopGrad(𝑧𝑑 − 𝑧𝑒),其中StopGrad(): gradients in the argument will be never calculated
实质上是用另一种方法做重参数化
损失形式:x − 𝑔(𝑧𝑒 + StopGrad (𝑧𝑑 − 𝑧𝑒)) ||
- 正确的前向传播过程
- decoder 参数可以正确反向传播
- encoder 参数可计算更新,在 d 和 e 间建立可导通路
Update of the codebook
希望 codebook 是有意义的
codebook loss:||𝑧𝑒 − StopGrad(𝑧𝑑)|| + 𝛽 ||𝑧𝑑 − StopGrad(𝑧𝑒)||
VQVAE loss = reconstruction loss + codebook loss
Improving capacity