What is torch.nn really? 自学笔记
What is torch.nn really?
PyTorch通过精心设计的模块和类——torch.nn、torch.optim、Dataset及DataLoader——来协助构建和训练神经网络
若要充分发挥其能力并针对具体问题实现定制化,就需要真正理解它们内部的运作机制
为建立这种理解,我们将首先在不使用这些模型中任何功能的情况下,在MNIST数据集上训练一个基础神经网络;初始阶段仅使用最基本的PyTorch张量功能
随后,逐步每次添加一个来自torch.nn、torch.optim、Dataset或DataLoader的功能组件,清晰展示每个部分的作用,以及它们如何使代码更简洁或更灵活
MNIST data setup
使用经典的MNIST数据集,它由手绘数字(0到9之间)的黑白图像组成
使用pathlib处理路径(属于Python 3标准库),并通过requests库下载数据集
1 | from pathlib import Path |
数据集采用numpy array格式,并使用Python特有的数据序列化格式pickle进行存储
每张图像的尺寸为28 x 28像素,并以长度为784(28x28)的扁平化行形式存储。需要先将其重塑为二维形式才能查看具体图像
1 | from matplotlib import pyplot |
- PyTorch使用torch.tensor而非numpy arrays,因此我们需要对数据进行转换
1 | import torch |
Neural net from scratch (without torch.nn)
首先仅使用PyTorch张量操作来创建模型
PyTorch提供了生成随机或全零张量的方法,我们将利用这些方法为简单线性模型创建权重和偏置
这些只是常规张量,但有一个特别重要的附加属性:告知PyTorch这些张量需要计算梯度。这将使PyTorch记录所有在张量上执行的操作,从而能够自动计算反向传播过程中的梯度
对于权重参数,我们在初始化后设置requires_grad属性,因为不希望该初始化步骤被包含在梯度计算中(注意:PyTorch中尾部下划线表示原地操作)
注:此处我们采用Xavier初始化方法(通过乘以1/sqrt(n))来初始化权重
1 |
|
得益于PyTorch自动计算梯度的能力,我们可以使用任何标准Python函数(或可调用对象)作为模型。只需编写基础的矩阵乘法和广播加法即可创建简单的线性模型
同时还需要一个激活函数,这里我们将实现log_softmax并使用它
注意:尽管PyTorch提供了大量预写的损失函数、激活函数等组件,但完全可以使用原生Python轻松编写自定义函数。PyTorch甚至会为函数自动生成快速加速器或向量化CPU代码
1 | def log_softmax(x): |
在上述代码中,@符号表示矩阵乘法运算
对单批数据(本例中为64张图像)调用该函数——这便是一次前向传播
需要注意的是,由于初始权重为随机值,当前阶段的预测效果不会优于随机猜测
1 | bs = 64 # batch size |
preds 张量不仅包含张量值,还包含一个梯度函数。稍后我们将使用它进行反向传播
现在实现负对数似然作为损失函数(可以直接使用标准 Python)
1 | def nll(input, target): |
- 用随机模型检查损失值,以便观察反向传播后是否有所改善
1 | yb = y_train[0:bs] |
- 还需要实现一个函数来计算模型的准确率。对于每个预测,如果最大值对应的索引与目标值相符,则预测正确
1 | def accuracy(out, yb): |
运行训练循环。每次迭代中,我们将:
- 选择一个minibatch的数据(大小为 bs)
- 使用模型进行预测
- 计算损失值
- loss.backward() 会更新模型的梯度(weights & bias)
现在我们使用这些梯度来更新权重和偏置。我们在 torch.no_grad() 上下文管理器中执行此操作,因为我们不希望这些操作被记录到下一次梯度计算中
随后将梯度归零,为下一个循环做好准备。否则梯度会持续累加所有已发生的操作记录(即 loss.backward() 会在已有存储值的基础上累加梯度,而不是替换它们)
提示:可以使用标准 Python 调试器逐步执行 PyTorch 代码,从而检查每个步骤中的各种变量值
1 | from IPython.core.debugger import set_trace |
至此,我们已经从零开始创建并训练了一个极简神经网络(本例中为 logistic regression,因为没有隐藏层)
现在检查 loss 和 accuracy 并与之前的结果进行对比。预期 loss 应该下降而 accuracy 应该上升,实际结果确实如此
1 | print(loss_func(model(xb), yb), accuracy(model(xb), yb)) |
Using torch.nn.functional
现在将对代码进行重构,使其保持原有功能不变,但开始利用PyTorch的nn类来使代码更简洁灵活
第一步通过用torch.nn.functional(通常按惯例导入为F)中的函数替代我们手写的激活函数和损失函数来缩短代码。该模块包含torch.nn库中的所有函数
除了各种损失函数和激活函数外,还可以在这里找到一些用于创建神经网络的便捷函数,例如池化函数(此外还有用于卷积、线性层等操作的函数)
如果使用的是负对数似然损失和log softmax激活函数,那么PyTorch提供了一个结合了这两者的单一函数F.cross_entropy。这样甚至可以从模型中移除激活函数
1 | import torch.nn.functional as F |
Refactor using nn.Module
接下来使用nn.Module和nn.Parameter来构建更清晰简洁的训练循环。通过子类化nn.Module(它本身是一个能够跟踪状态的类)来实现
在这种情况下需要创建一个包含权重、偏置和前向传播方法的类
nn.Module具有许多我们将用到的属性和方法(例如.parameters()和.zero_grad())
注意:nn.Module(大写M)是PyTorch特有的概念,是一个我们会频繁使用的类。不要将nn.Module与Python中(小写m)module的概念混淆,后者是指可被导入的Python代码文件
1 | from torch import nn |
- 由于我们现在使用对象而不是单纯使用函数,因此首先需要实例化我们的模型:
1 | model = Mnist_Logistic() |
现在我们可以用与之前相同的方式计算损失
注意:nn.Module对象的使用方式与函数类似(即可调用),但底层PyTorch会自动调用我们的forward方法
1 | print(loss_func(model(xb), yb)) |
- 在先前的训练循环中,我们必须按名称逐个更新每个参数的值,并手动将每个参数的梯度单独清零
1 | with torch.no_grad(): |
- 现在我们可以利用 model.parameters() 和 model.zero_grad()(这两个方法都是由 PyTorch 为 nn.Module 定义的)来简化这些步骤,并降低遗漏某些参数的错误风险,尤其是在模型更为复杂的情况下:
1 | with torch.no_grad(): |
- 将把训练循环封装到fit函数中,以便后续可以重复运行
1 | def fit(): |
Refactor using nn.Linear
继续重构代码,使用Pytorch的nn.Linear类来实现线性层,而不是手动定义和初始化self.weights和self.bias,以及计算xb @ self.weights + self.bias
Pytorch提供了多种预定义层类型,可以极大简化我们的代码,同时通常还能提升运行效率
1 | class Mnist_Logistic(nn.Module): |
- 按照与之前相同的方式实例化模型并计算损失:
1 | model = Mnist_Logistic() |
Refactor using torch.optim
Pytorch 还提供了一个包含各种优化算法的包 torch.optim
可以使用优化器中的 step 方法来执行前向步骤,而无需手动更新每个参数。这将使我们能够替换之前手动编写的优化步骤:
1 | """ |
- optim.zero_grad() 会将梯度重置为0,我们需要在计算下一个minibatch的梯度之前调用它
1 | from torch import optim |
Refactor using Dataset
PyTorch 提供了一个抽象 Dataset 类。任何具有 len 函数(通过 Python 标准 len 函数调用)和 getitem 函数(作为索引方式)的对象都可以作为 Dataset
PyTorch 的 TensorDataset 是一个封装 tensor 的 Dataset
通过定义长度和索引方式,它同时提供了沿 tensor 第一维度进行迭代、索引和切片的方法
1 | from torch.utils.data import TensorDataset |
- x_train 和 y_train 可以合并到一个 TensorDataset 中,这样更便于进行迭代和切片操作
1 | train_ds = TensorDataset(x_train, y_train) |
- 先前需要分别对 x 和 y 的小批量数据进行迭代,现在可以将这两步合并一起实现:
1 | """ |
Refactor using DataLoader
PyTorch的DataLoader负责批量数据管理。可以从任何Dataset创建DataLoader
DataLoader简化了批量迭代过程,无需手动使用train_ds[ibs : ibs+bs]这样的切片操作,DataLoader会自动提供每个minibatch的数据
1 | from torch.utils.data import DataLoader |
- 先前循环是注释这样迭代批次 (xb, yb) 的,现在由于 (xb, yb) 是从数据加载器自动加载的,循环变得简洁得多:
1 | """ |
- 得益于 PyTorch 的 nn.Module、nn.Parameter、Dataset 和 DataLoader,训练循环现在显著简化且更易于理解。现在尝试添加在实践中创建有效模型所需的基本功能
Add validation
第一部分主要致力于为训练数据建立合理的训练循环。实际上始终应该包含验证集(validation set),以便识别是否出现 overfitting
对训练数据进行 shuffle 对于防止批次间相关性及 overfitting 至关重要
另一方面,无论是否对验证集进行 shuffle,验证损失值都将保持一致。由于 shuffle 需要额外时间,因此对验证数据进行 shuffle 没有意义
我们将为验证集使用两倍于训练集的 batch size。这是因为验证集不需要反向传播(backpropagation),因此占用内存更少(不需要存储梯度)
1 | train_ds = TensorDataset(x_train, y_train) |
在每个epoch结束时计算并打印验证损失值
注意:在训练前我们总是调用model.train(),在推理前调用model.eval(),这是因为诸如nn.BatchNorm2d和nn.Dropout等层会使用这些状态来确保在不同阶段具有相应的正确行为
主要作用:
- 启用训练特定行为:
- 对 Dropout 层:在训练模式下,Dropout 层会按照设定的概率随机将部分神经元输出置为零,防止过拟合
- 对 BatchNorm 层:在训练模式下,BatchNorm 会使用当前批次的统计量(均值和方差)进行标准化,并更新运行平均值
- 与评估模式区分:
- 对应的 model.eval() 方法会将模型设置为评估模式,关闭上述训练特定行为
- Dropout 层在评估模式下会变为直接通过而不丢弃任何神经元
- BatchNorm 层在评估模式下会使用训练期间计算的运行平均值和方差,而不是当前批次的统计量
- 启用训练特定行为:
1 | model, opt = get_model() |
Create fit() and get_data()
由于在训练集和验证集上计算损失的过程类似,我们将其封装为一个独立的函数 loss_batch,该函数用于计算单个批次的损失
对于训练集,我们传入优化器(optimizer)并执行反向传播(backprop)。对于验证集,则不传入优化器,因此该方法不会执行反向传播
1 | def loss_batch(model, loss_func, xb, yb, opt=None): |
- fit 函数运行必要的操作来训练模型,并计算每个周期(epoch)的训练损失和验证损失
1 | import numpy as np |
- get_data 函数返回训练集和验证集的数据加载器(dataloaders)
1 | def get_data(train_ds, valid_ds, bs): |
- 现在,我们只需三行代码即可完成获取数据加载器和训练模型的完整流程:
1 | train_dl, valid_dl = get_data(train_ds, valid_ds, bs) |
Switch to CNN
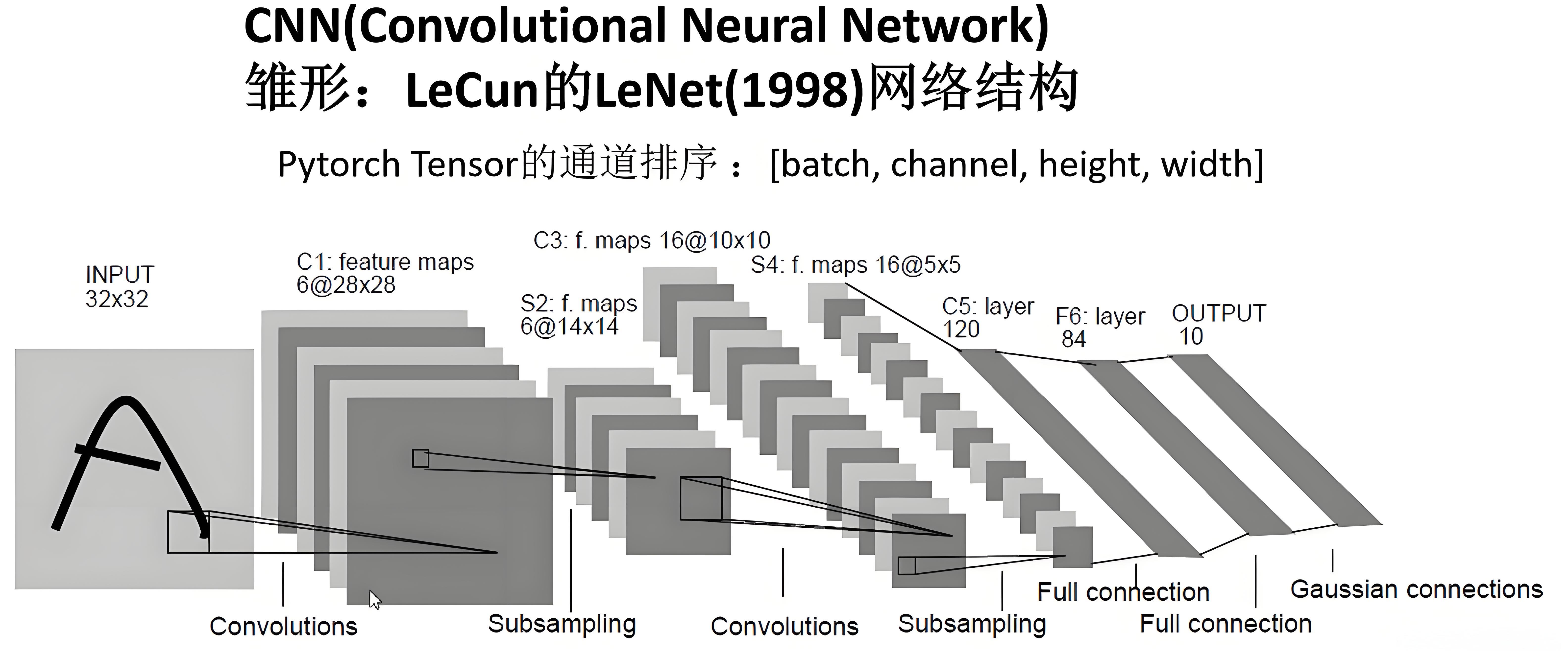
现在构建一个包含三个卷积层的神经网络。由于之前章节中的所有函数均未对模型形式做任何特定假设,我们将能够直接使用它们来训练CNN而无需任何修改
使用PyTorch预定义的Conv2d类作为卷积层。我们定义的CNN包含3个卷积层,每个卷积操作后都接有ReLU激活函数,最后执行average pooling
注意:view是PyTorch中与Numpy的reshape功能相对应的方法
1 | class Mnist_CNN(nn.Module): |
- Momentum是随机梯度下降的一种变体,它不仅考虑当前更新,还会纳入之前的更新信息,通常能够加速训练过程
1 | model = Mnist_CNN() |
Using nn.Sequential
torch.nn 提供了另一个便捷类 Sequential 来简化我们的代码。Sequential 对象会按顺序运行其包含的每个模块
为了利用这个特性,需要能够根据给定函数定义自定义层
1 | class Lambda(nn.Module): |
Wrapping DataLoader
当前的CNN相当简洁,但它仅适用于MNIST数据集,原因是:
- 假定输入是28*28的长向量
- 假定最终的CNN网格尺寸为4*4(因为我们使用了该尺寸的平均池化kernel)
让我们消除这两个假设,使模型能够处理任何二维单通道图像。首先,我们可以通过将数据预处理移入生成器(generator)来移除初始的Lambda层
1 | def preprocess(x, y): |
- 用 nn.AdaptiveAvgPool2d 替换 nn.AvgPool2d,从而允许定义期望的输出tensor尺寸,而不是依赖于输入张量的尺寸。因此,我们的模型将能够处理任意尺寸的输入
1 | model = nn.Sequential( |
Using your Accelerator
1 | # If the current accelerator is available, we will use it. Otherwise, we use the CPU. |
- 更新 preprocess 函数,将数据batches移至accelerator:
1 | def preprocess(x, y): |