
计算机视觉 02 Image Formation
Camera
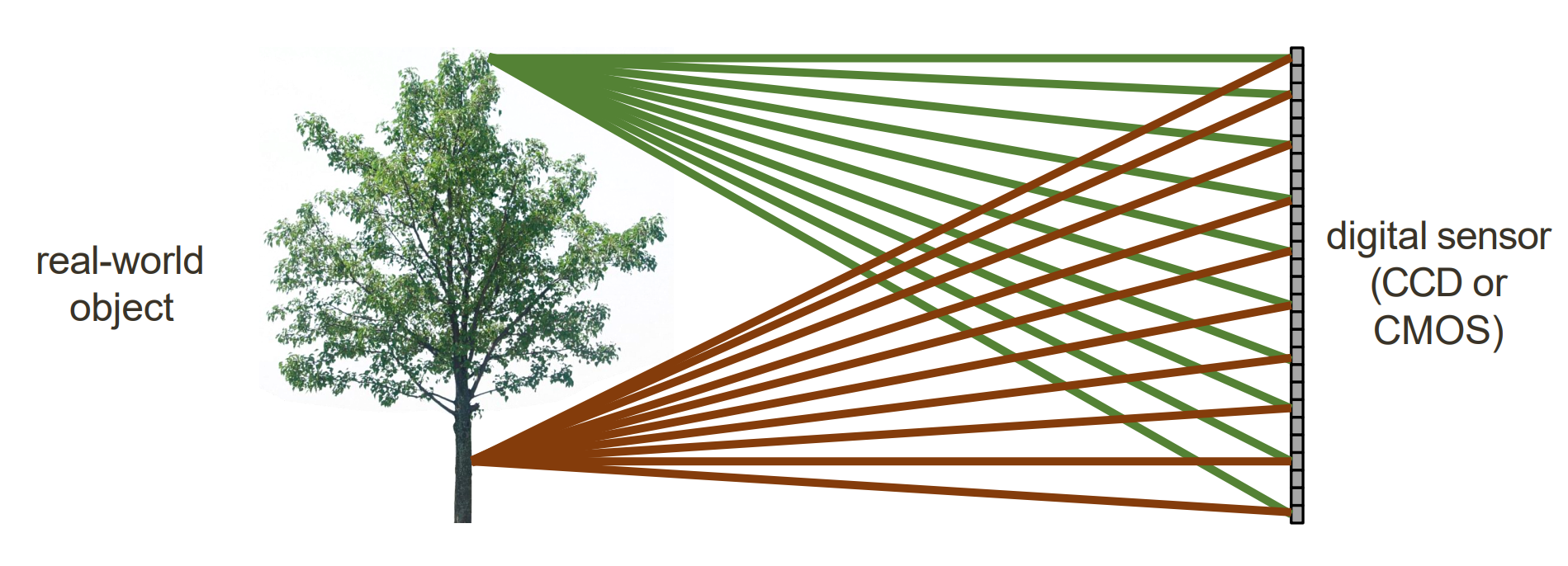
Biuld a camera with a sensor
- 物体会向传感器的各个位置传光,导致传感器各个位置接收到物体各个位置传来的光,最后的成像模糊不清
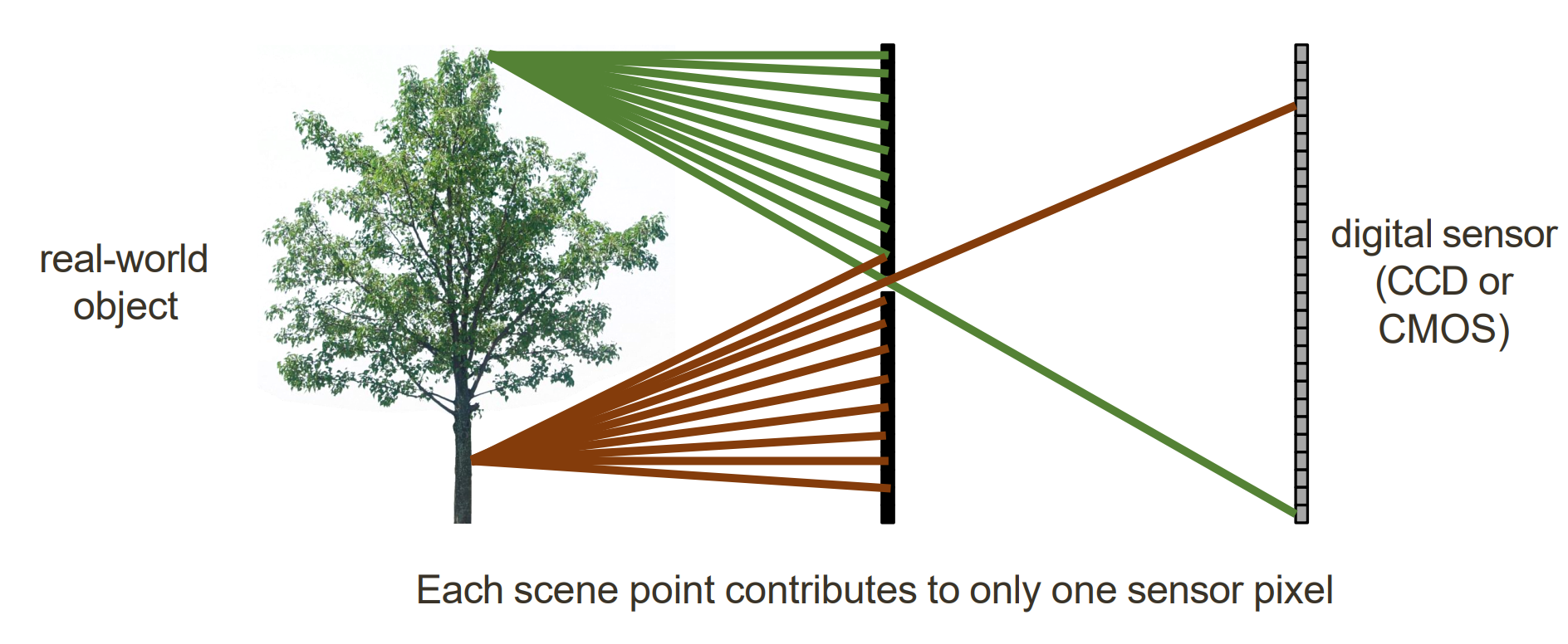
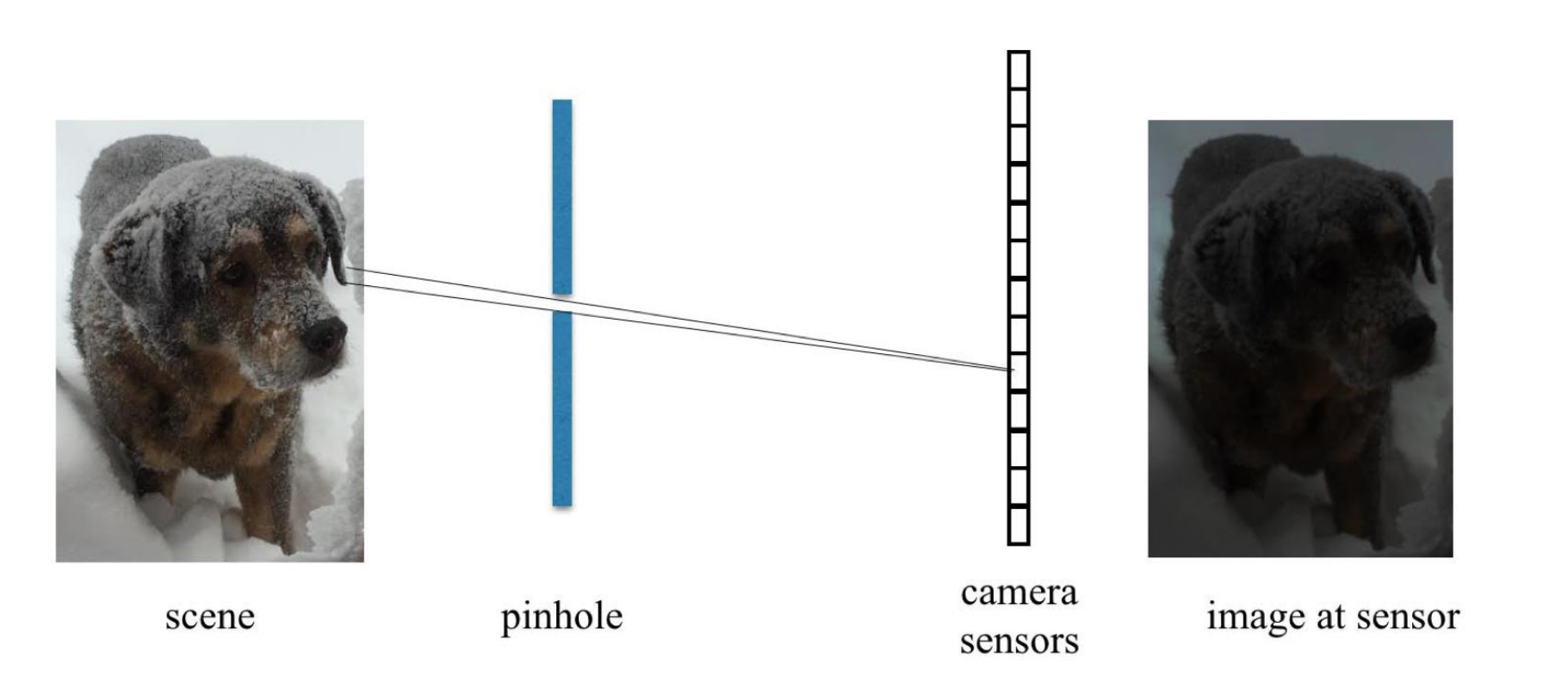
Pinhole Camera(小孔成像)
大部分的光被阻隔,使得每个图像点对应传感器上的一个像素点
小孔成像呈现倒立的像
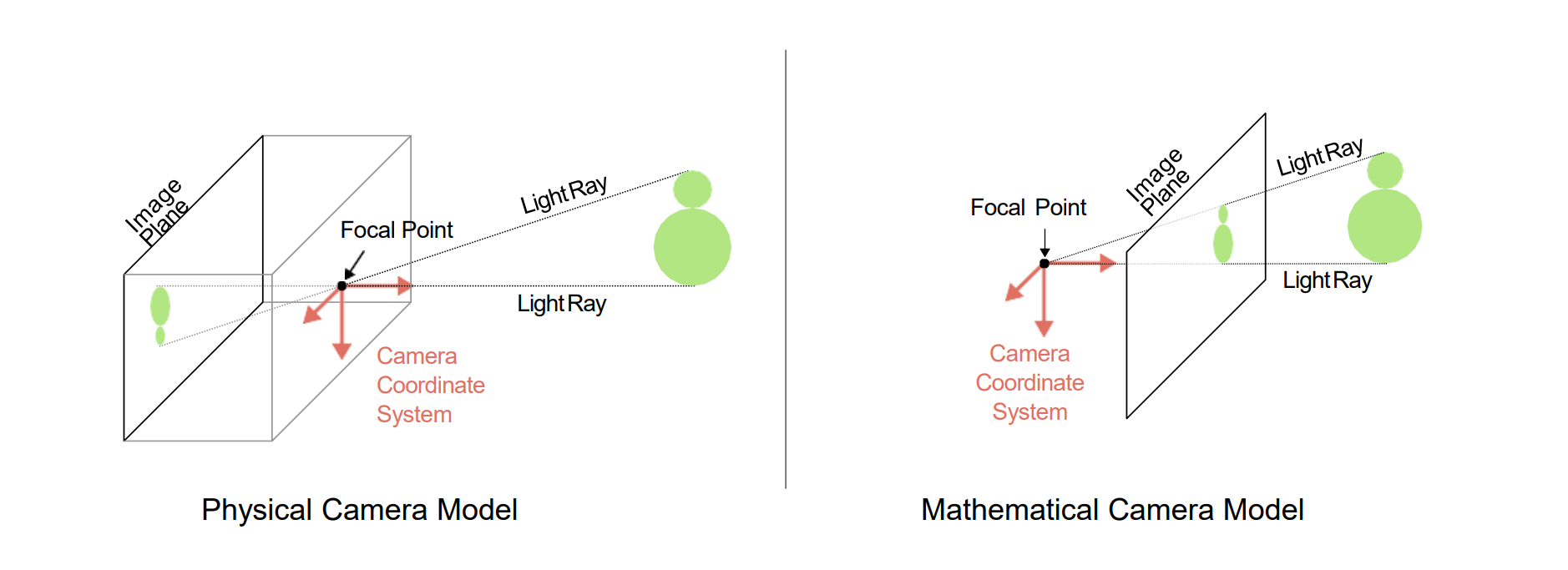
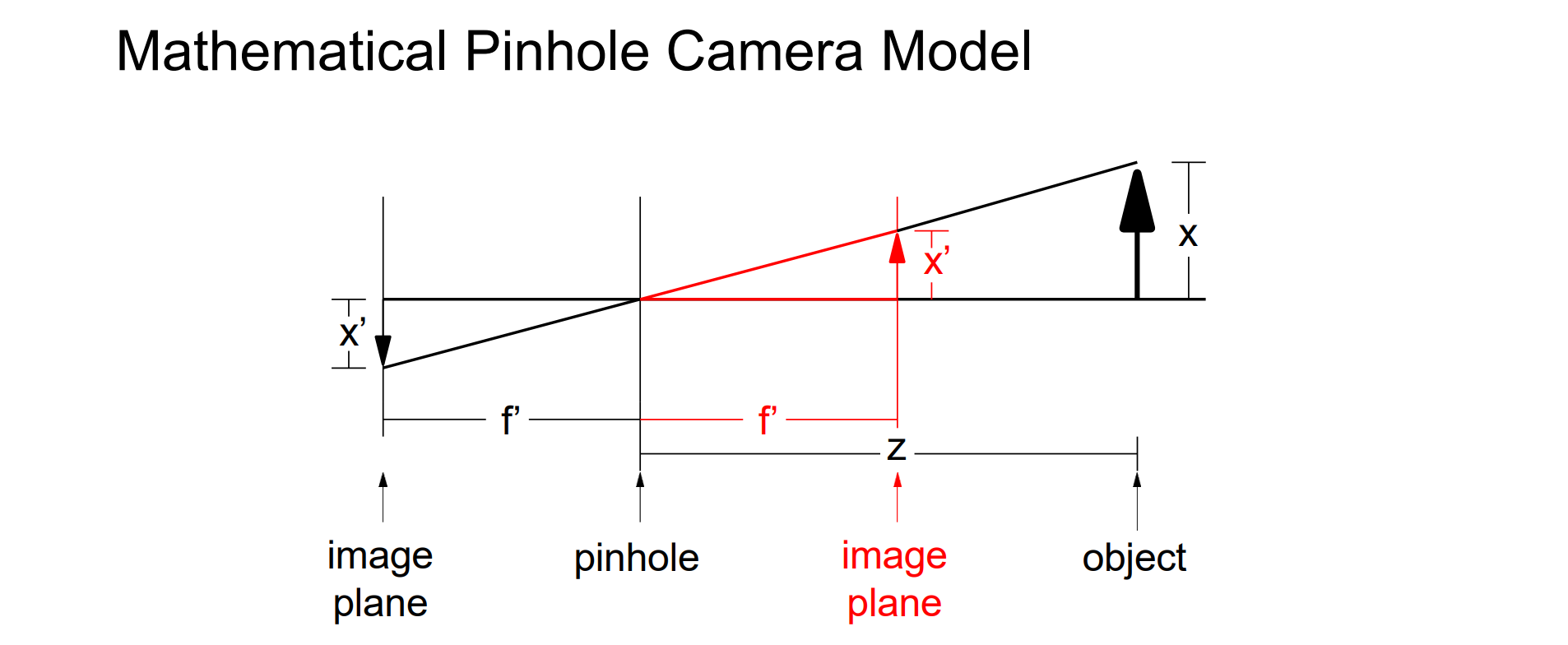
- 小孔成像的数学模型:数学上为了方便,将所成的像沿小孔对称使其与物体在同一侧,从而可以根据相似关系求解
Coordinate Frames(重点)
- 世界坐标 -> 相机坐标(以相机为原点) -> 图像坐标 -> 像素坐标
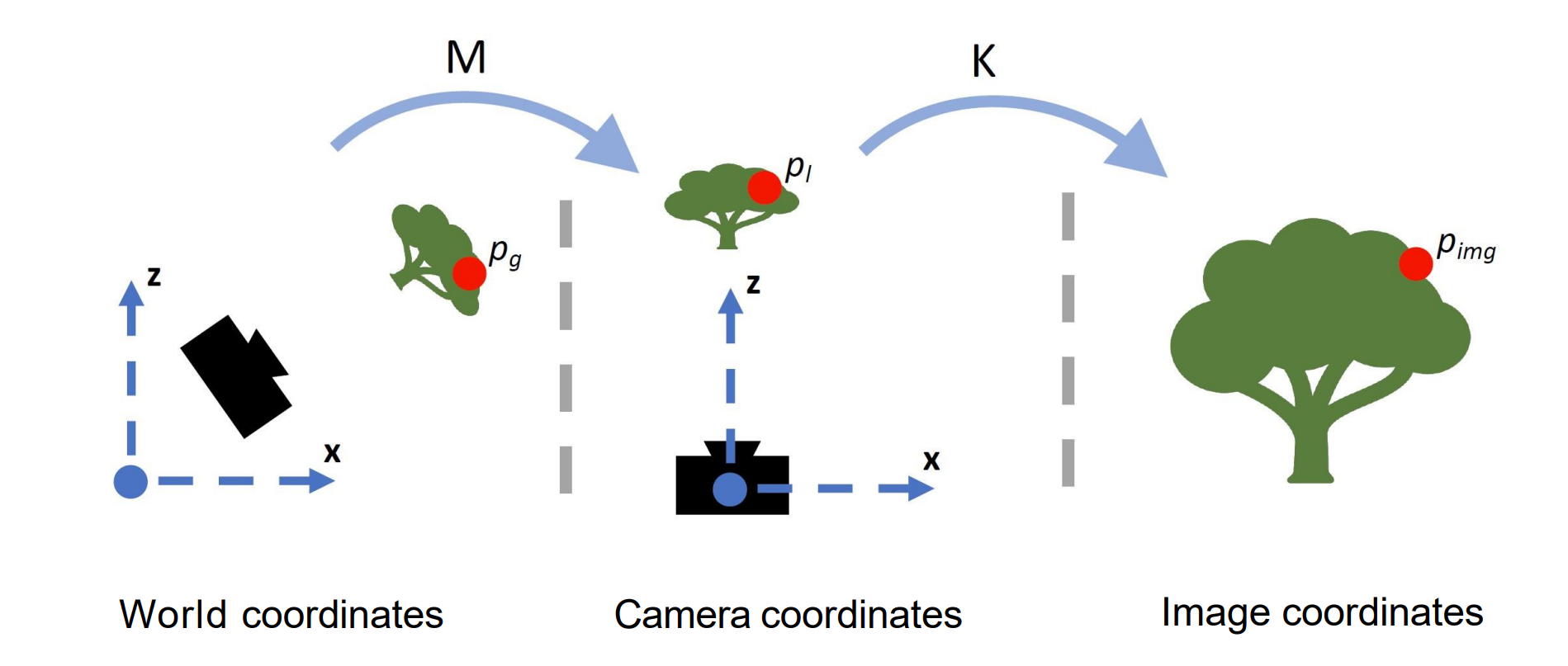
相机矩阵:建立了从三维到二维的投影关系。成像的过程就是三维空间坐标到二维图像坐标的变化,是一个投影的过程
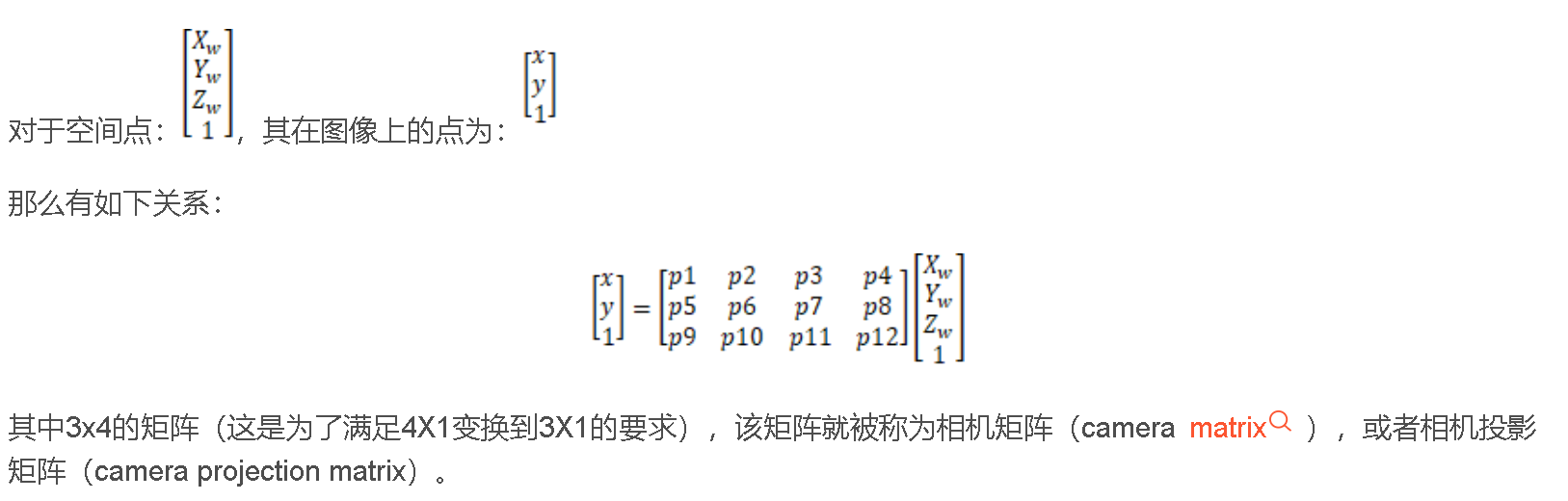
用[xw yw zw]来表示一个空间点的坐标,用[x y]来表示对应于成像平面上的一个图像点的坐标(不是像素坐标),那么这两个点肯定是有一种变换关系联系起来的,把这个变换关系记为P:
Camera Parameters
图像坐标系:以图像左上角为原点建立以像素为单位的直接坐标系u-v。像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数
图像坐标系的主点:相机光轴与图像平面的交点(一般位于图像平面的中心处)
由于我们拿到的图像是以像素来衡量的,因此还需要将图像坐标系转化为像素坐标系。由于(u,v)只代表像素的列数与行数,而像素在图像中的位置并没有用物理单位表示出来,所以,我们还要建立以物理单位(如毫米)表示的图像坐标系x-y,主要的用途:求主点坐标
Extrinsic Camera parameters
外参矩阵:将世界坐标系转换成相机坐标系。由平移矩阵和旋转矩阵二合一而成。记为M
世界坐标系:世界坐标系是为了描述相机的位置而被引入的
相机坐标系:O点为摄像机光心(投影中心),Xc轴和Yc轴与成像平面坐标系的x轴和y轴平行,Zc轴为摄像机的光轴,和图像平面垂直。光轴与图像平面的交点为图像的主点O1,由点O与Xc,Yc,Zc轴组成的直角坐标系称为摄像机的坐标系。OO1为摄像机的焦距
平移向量t和旋转矩阵R可以用来表示相机坐标系与世界坐标系的关系
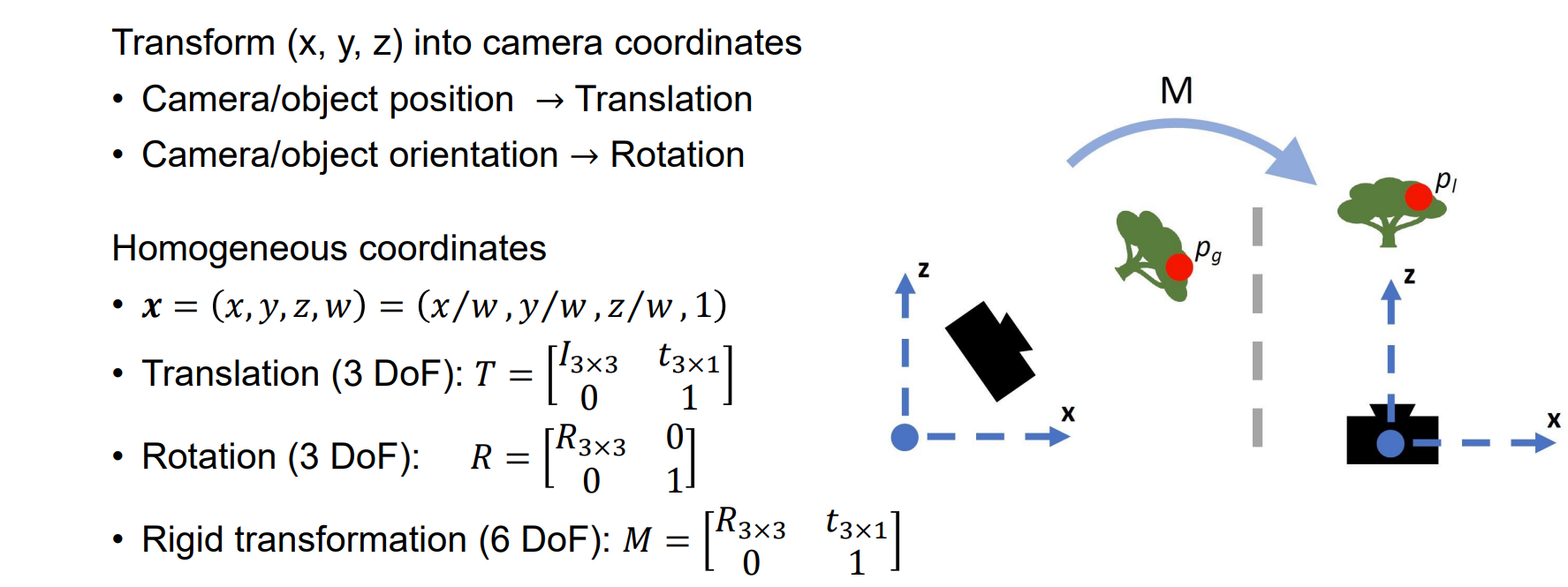

- 由于是齐次坐标系,最后是1,所以实际上是三维
Intrinsic Camera Parameters
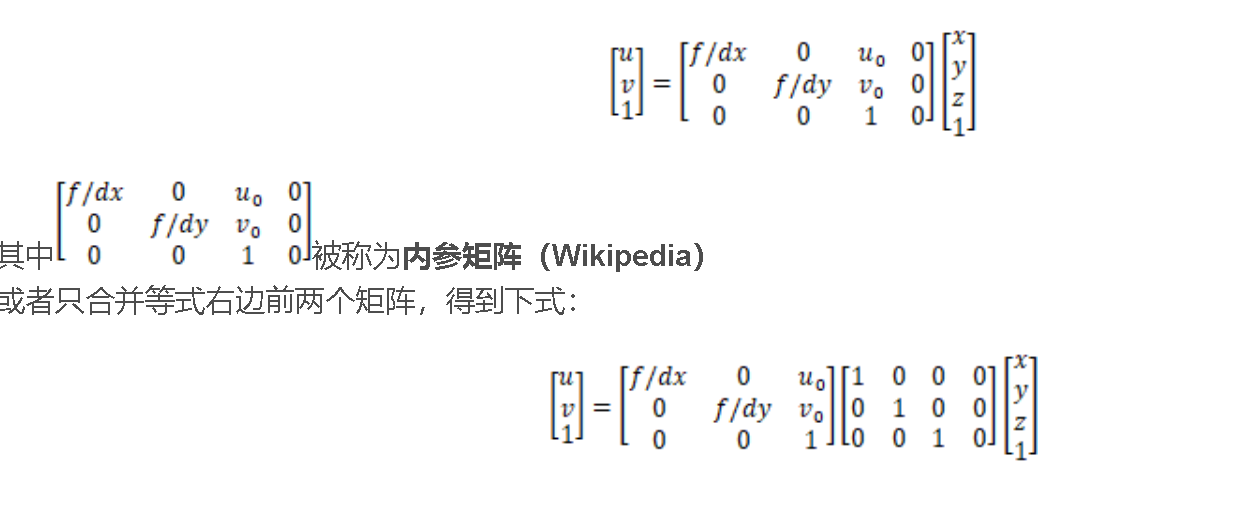
- 内参矩阵:将相机平面投影到图像平面
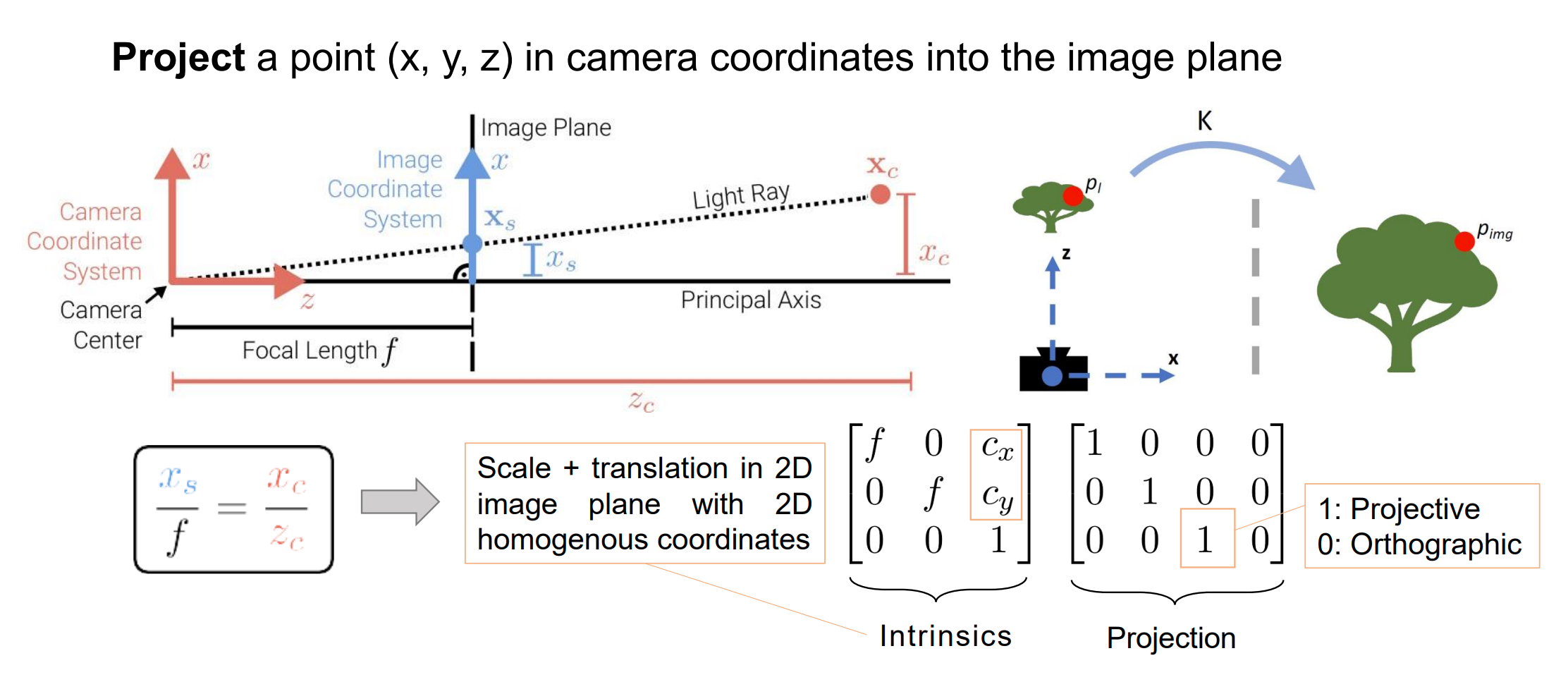
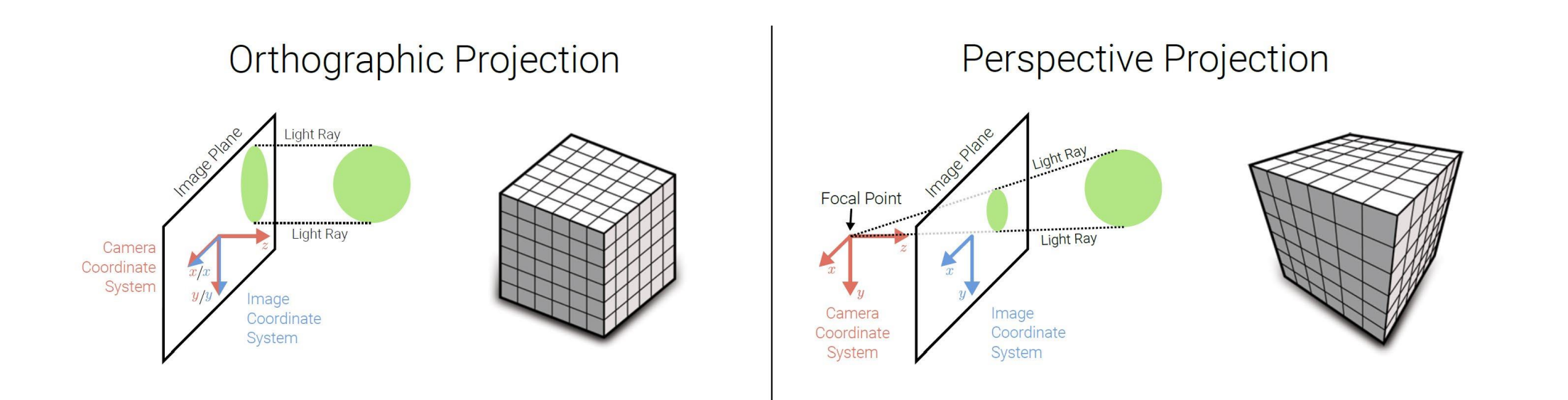
其中f是焦距,起到缩放作用、cx,cy是二维空间上的平移,也就是主点的实际位置,单位是像素。Projection最后一行如果为1则是正交投影(比例不变),如果是0则是透视投影
一个重要的相似关系:xs/f = xc/zc
将图像的主点定义为该坐标系的原点O1,且x轴与u轴平行,y轴与v轴平行,假设(u0,v0)代表O1在u-v坐标系下的坐标,dx与dy分别表示每个像素在横轴x和纵轴y上的物理尺寸,则图像中的每个像素在u-v坐标系中的坐标和在x-y坐标系中的坐标之间都存在如下的关系:u = x / dx + u0; v = y / dy + v0;(dx,dy的单位是:长度/像素)
可将上式用齐次坐标与矩阵形式表示为:
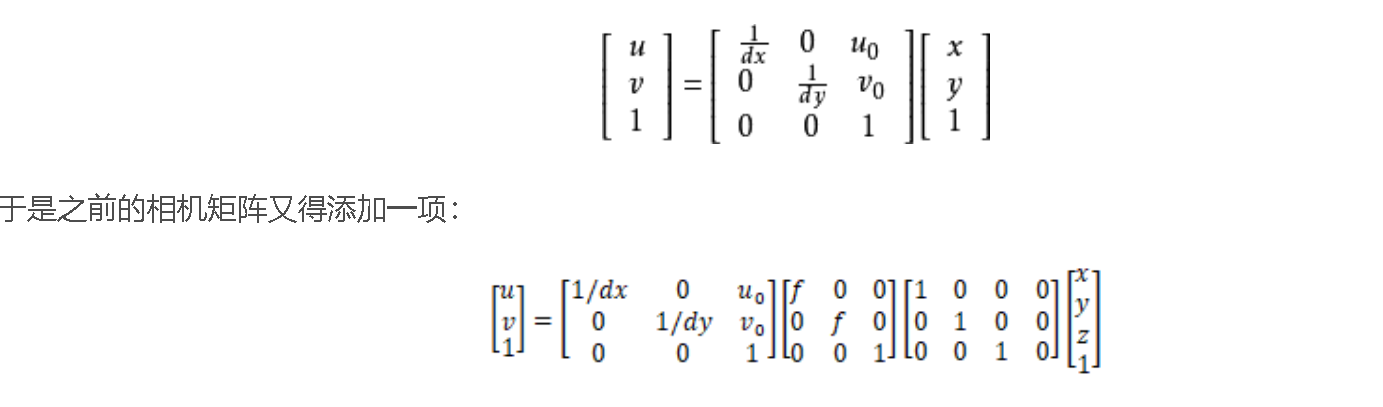
- 等式右边的前三个矩阵合并,得到下式的内参矩阵:
- 正交投影和透视投影:
- summary:
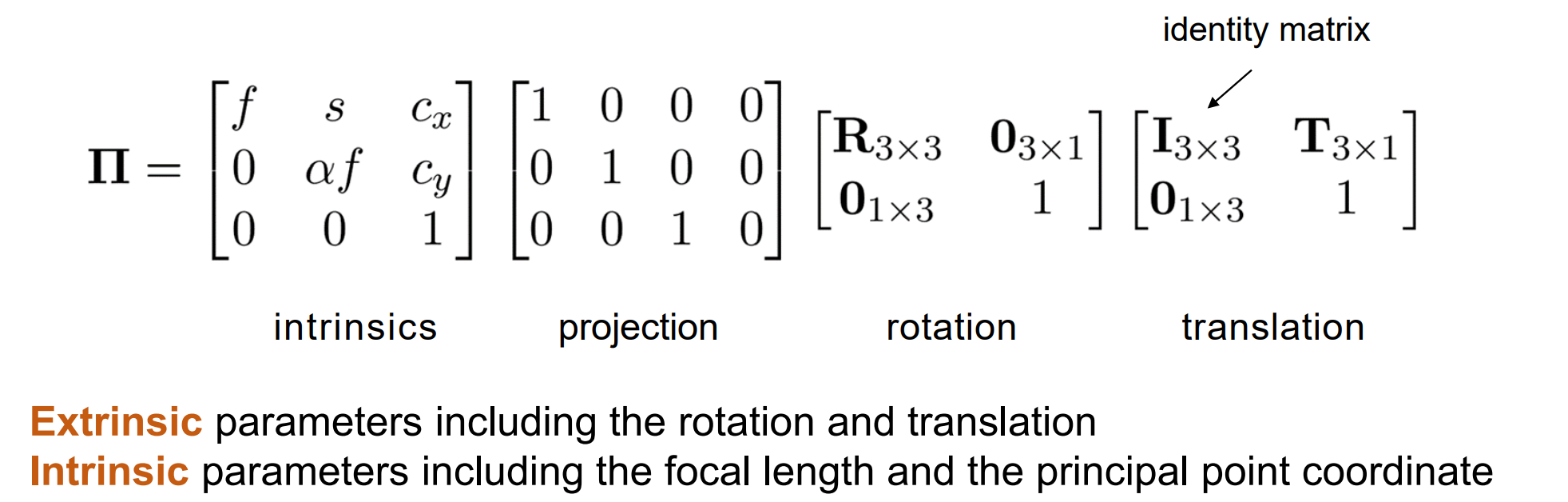
- s是错切,一般为0;α控制缩放x,y的比例不同,一般相同α = 1
Properties of Projection(投影的性质)
投影不是线性变化
直线投影后还是直线,点投影后还是点
投影后角度会发生变化
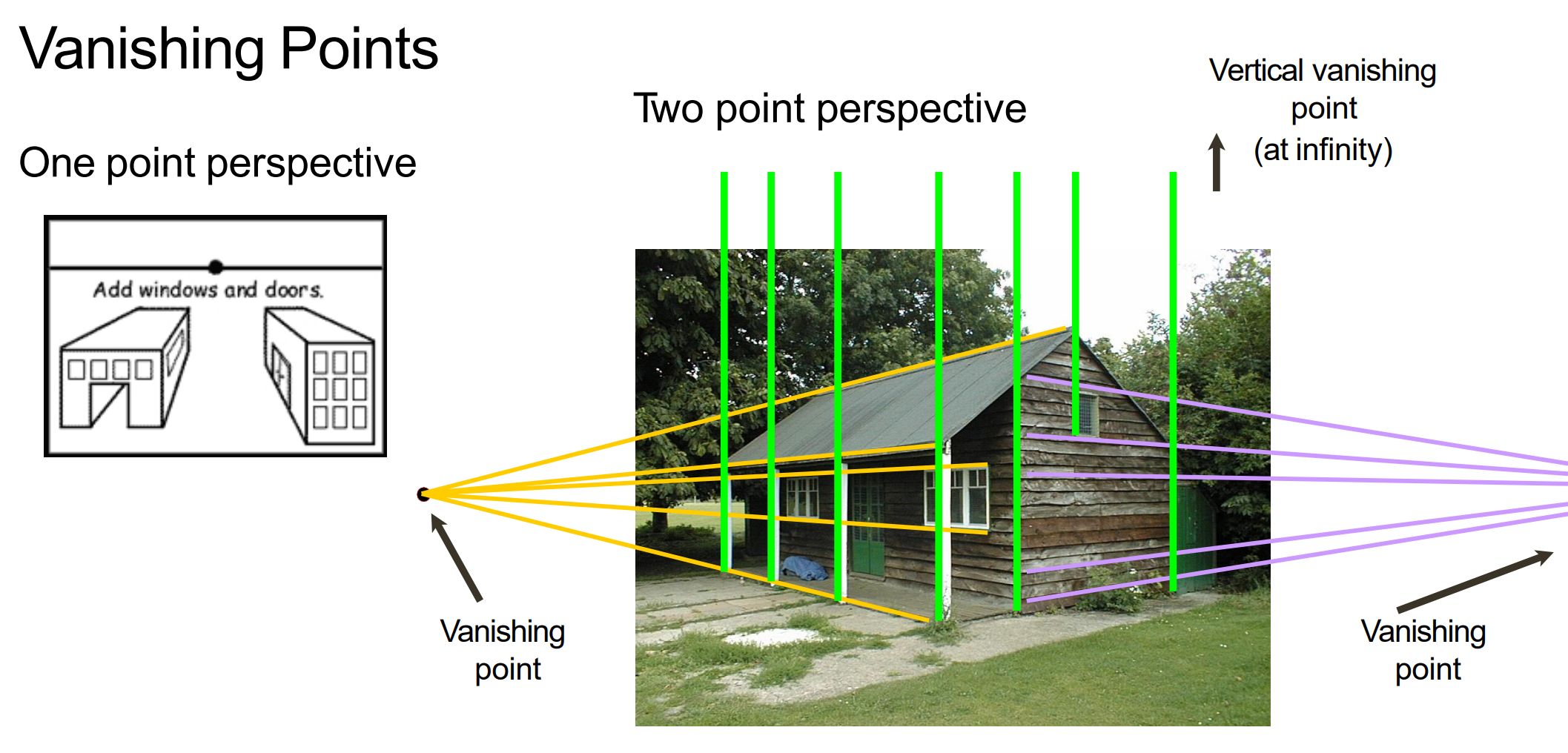
平行线会相交于vanishing point。穿过vanishing point的直线成为Vanishing line
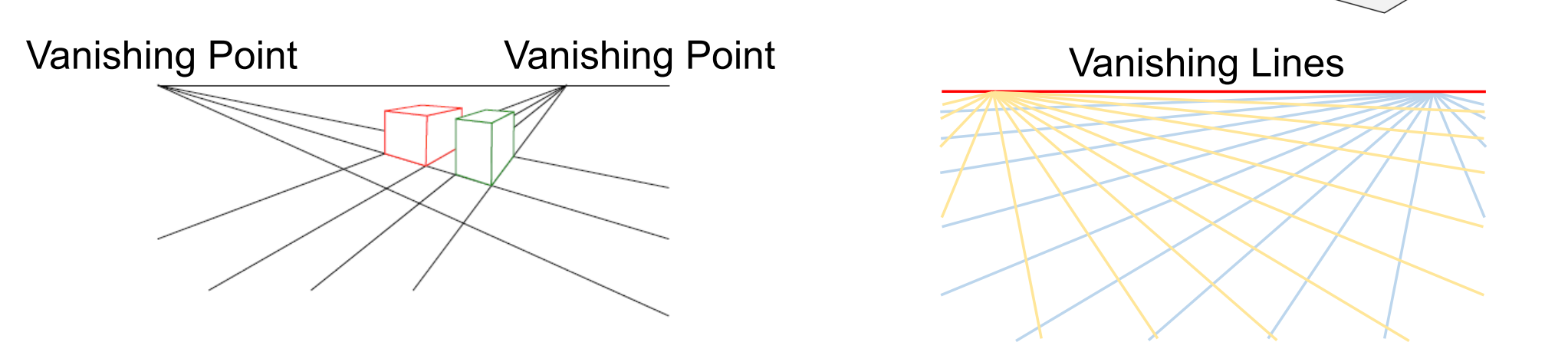
Vanishing Points
- 在其次坐标的思想下,无穷远点可描述,因此Vanishing point可以用其次坐标的思想描述
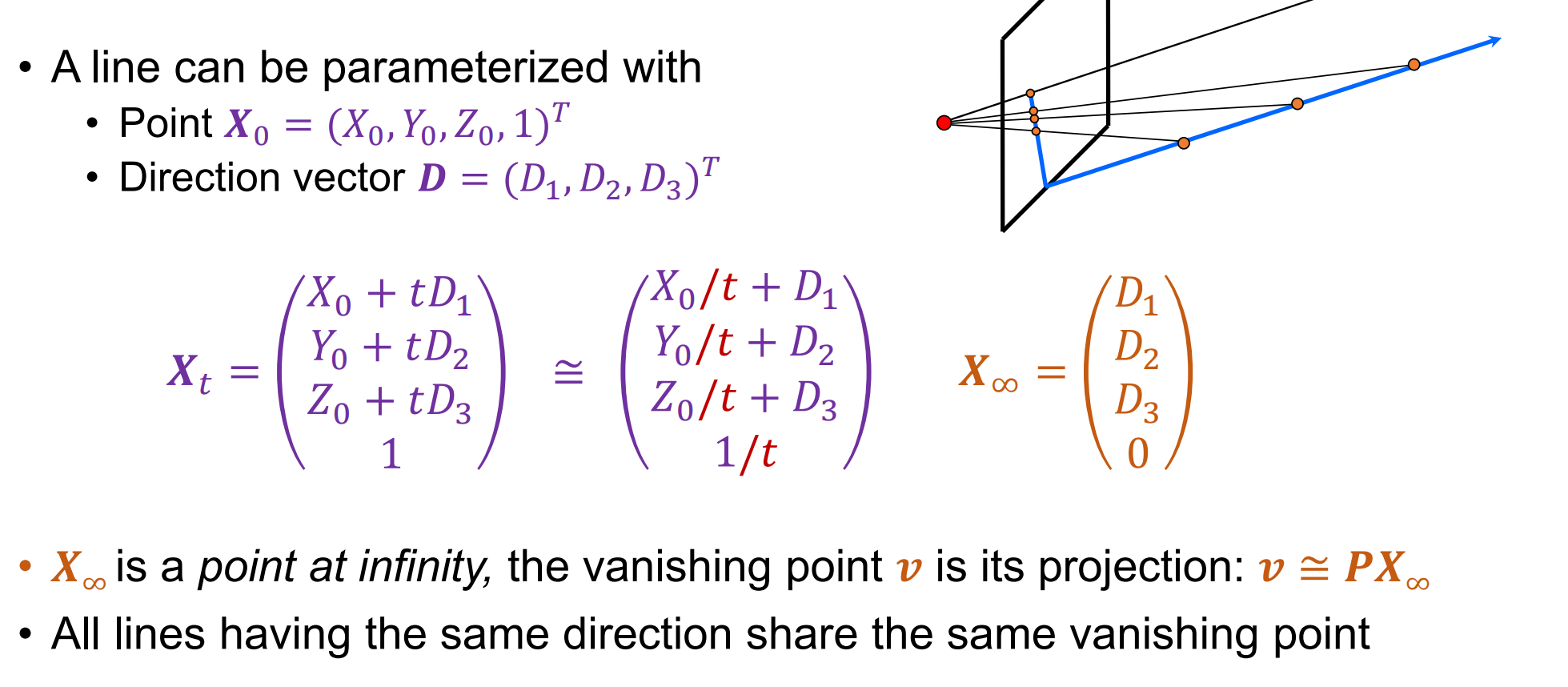
- 由于相同方向的平行线有相同的Vanishing point,两点确定一条直线。所以找Vanishing line的方法:两点透视法,找两组方向不同的平行线,相交于两个Vanishing point,从而确定Vanishing line
Lens(镜头)
Pinhole Camera
- 孔太小的问题:图像暗、需要长曝光,可能发生衍射;孔太大的问题:图像模糊
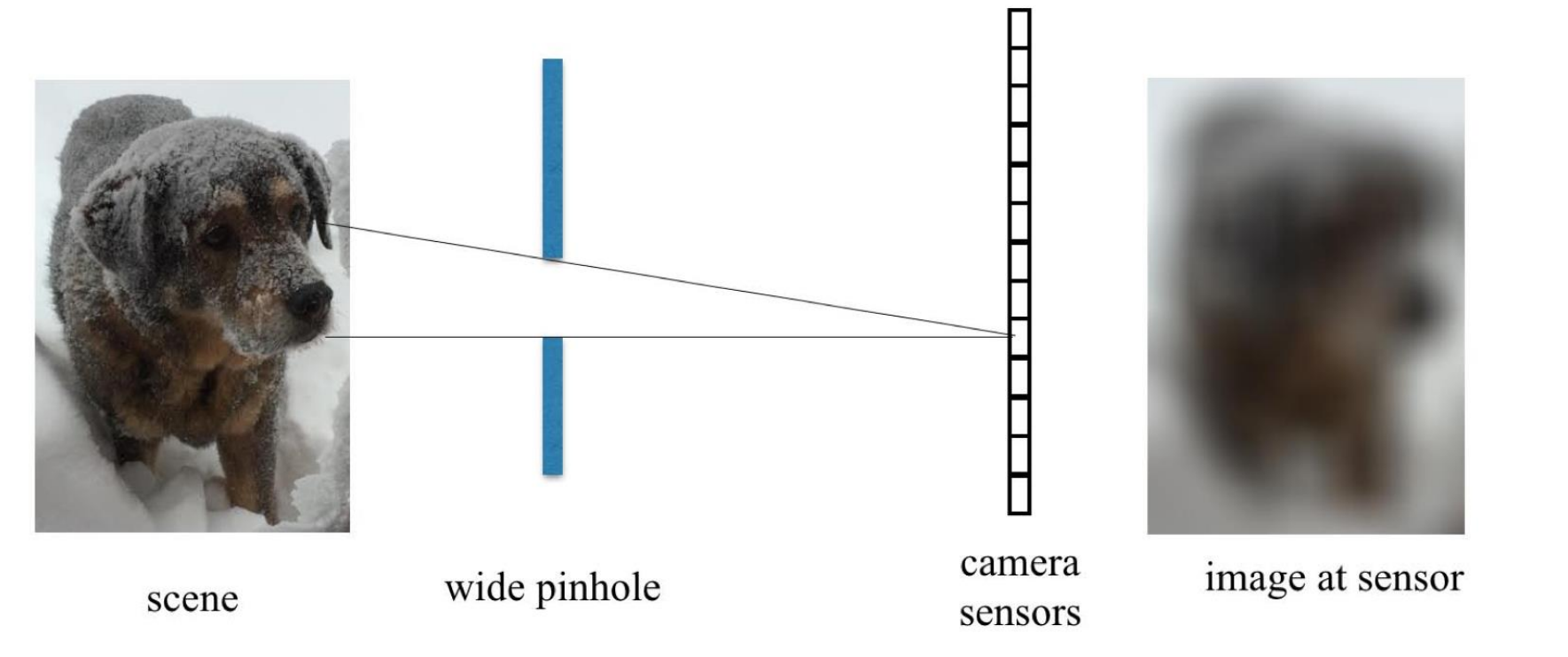
Camera with Lens
镜头可以得到大光圈和清晰的图像
镜头的作用是捕捉更多的光线,同时尽可能地保留理想针孔相机的抽象性。同时,镜头可以改变光的路径
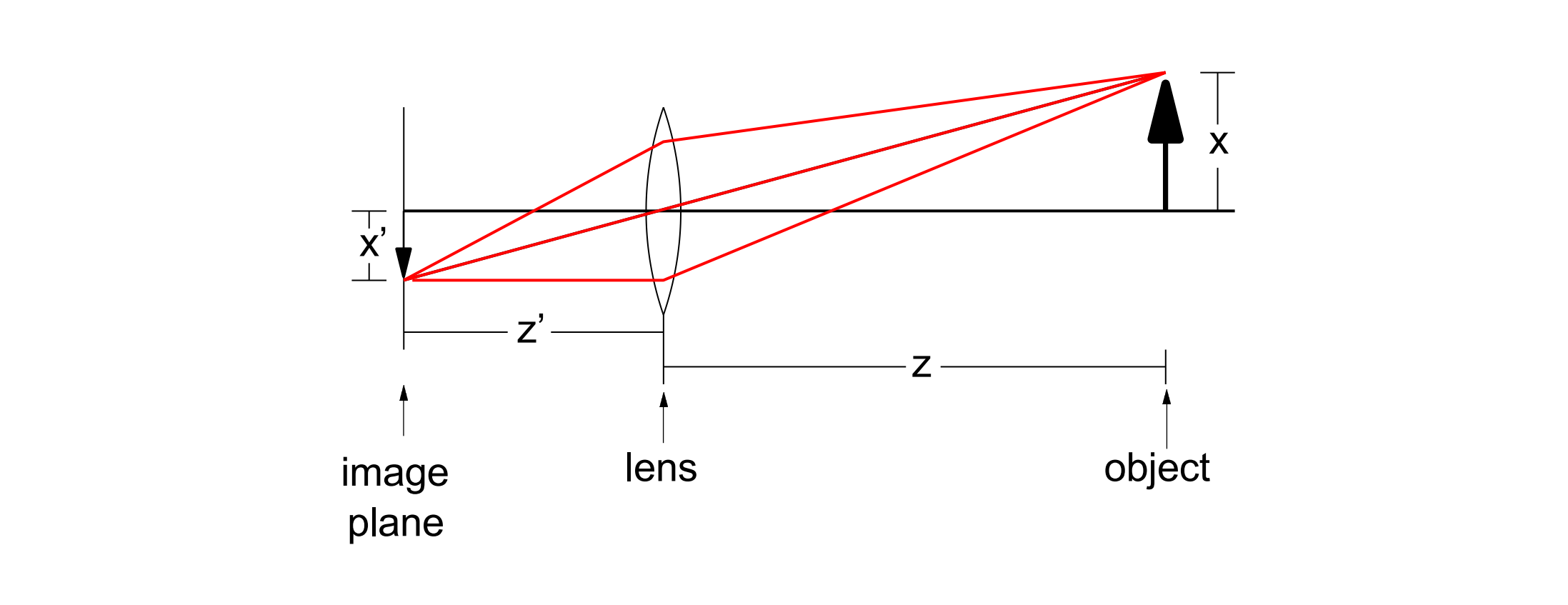
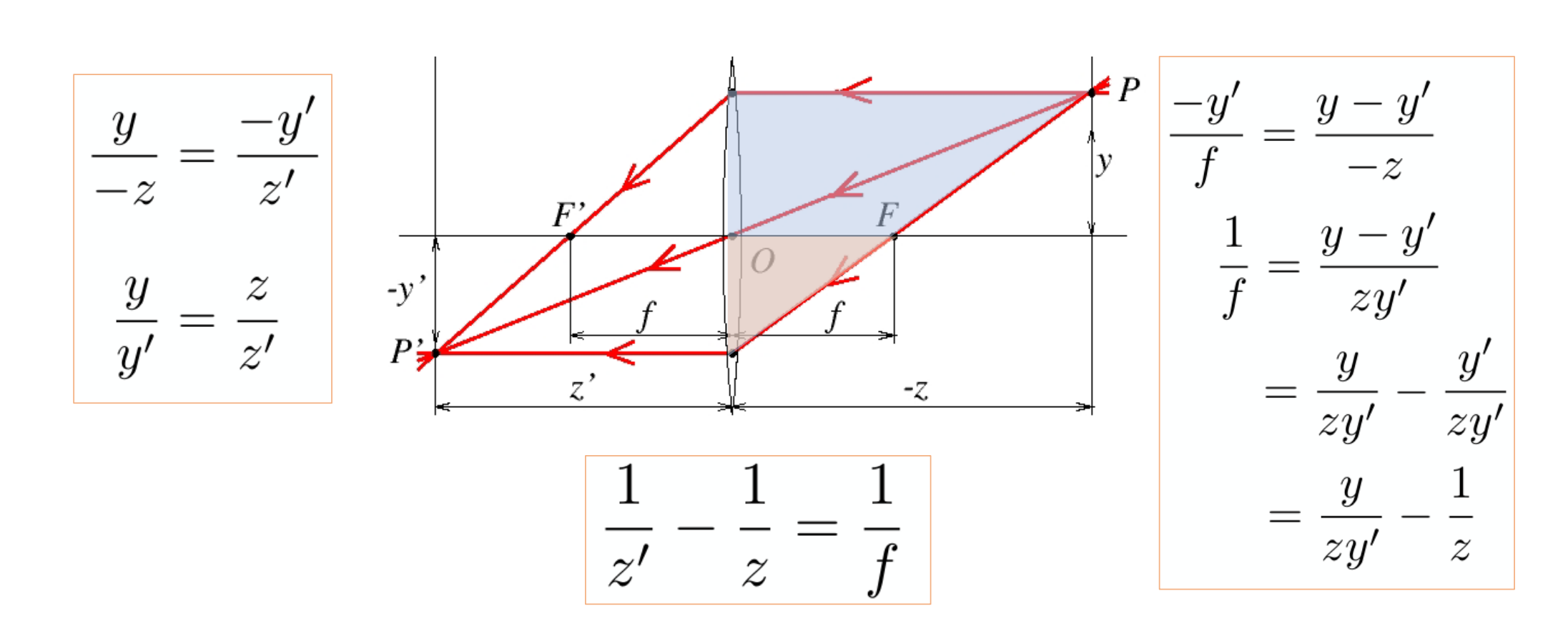
- 薄透镜方程:(通过相似△推导)
Depth of Field (视野、景深DoF)
- 对于固定焦距和图像平面,对象“聚焦”的距离是特定,。其他点被投影到图像中的“混淆圈”
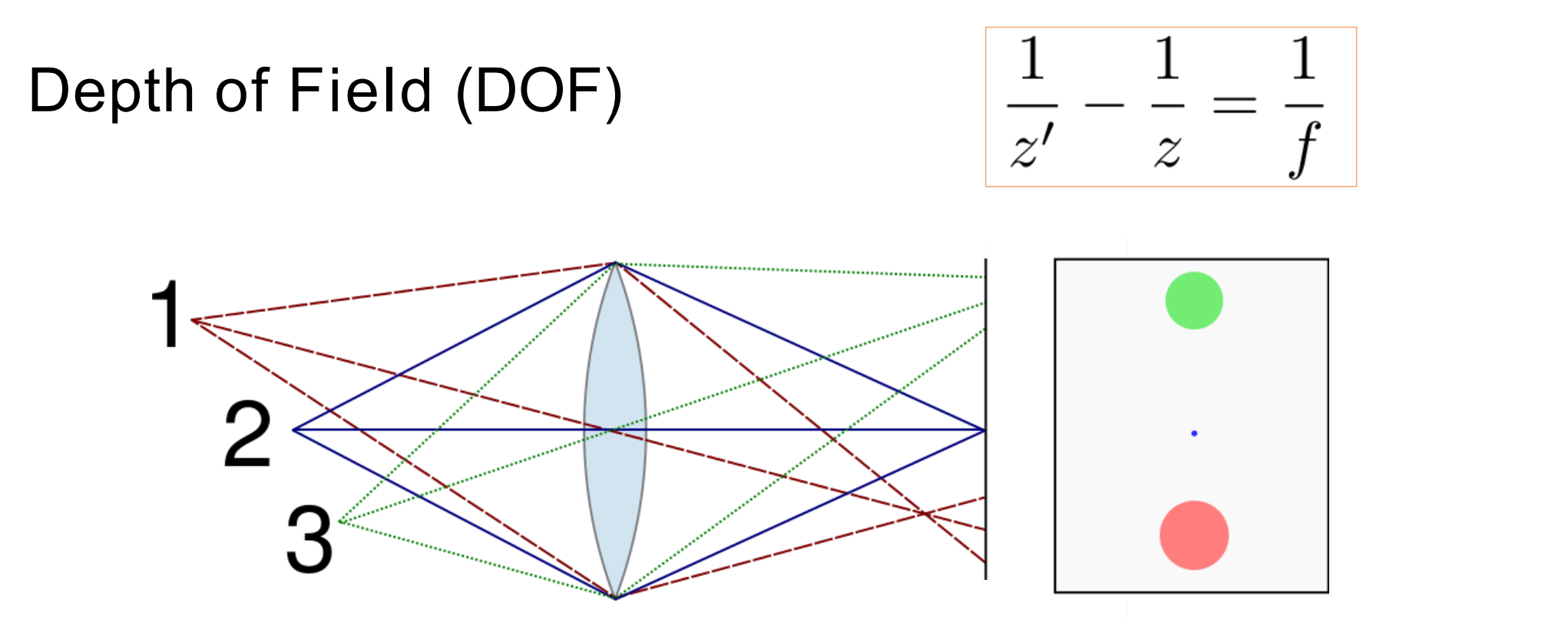
景深:场景中最近和最远的对象之间的距离,这些对象在图像中看起来清晰得可以接受
影响景深的因素:
- 光圈大小:光圈越小,景深越大。小光圈减少了光量,从而需要增加曝光,图像噪点更多
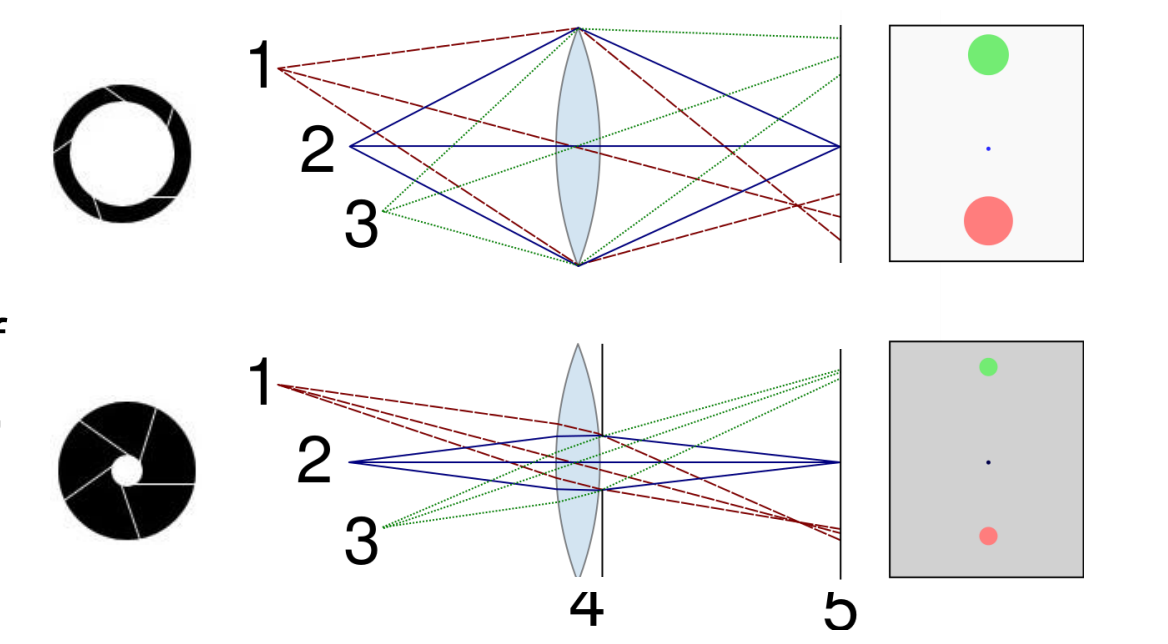
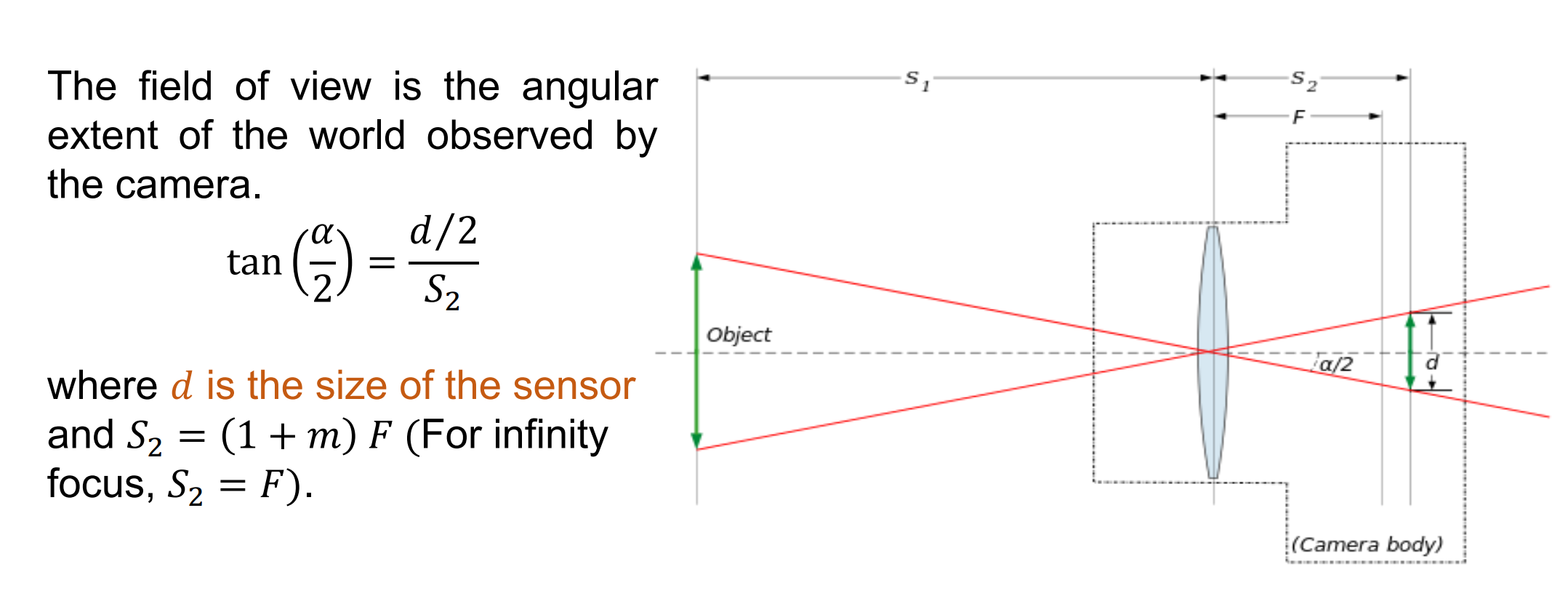
- 焦距:焦距越大,景深越小。视野是照相机观察到的世界的角度范围
- 拍摄距离:拍摄距离越远,景深越大
- 光圈大小:光圈越小,景深越大。小光圈减少了光量,从而需要增加曝光,图像噪点更多
Lens Aberrations(镜头像差/畸变)
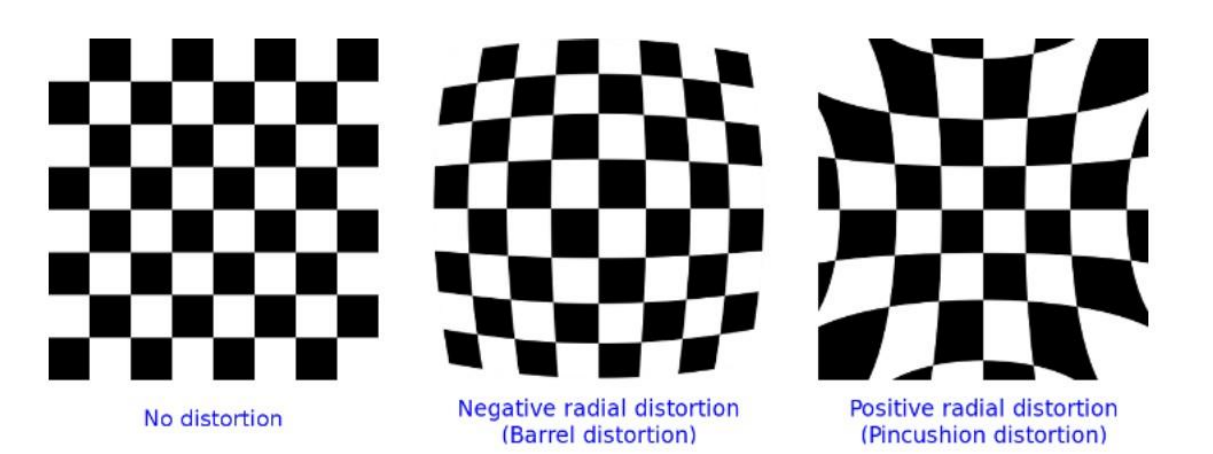
Radial Distortion
短焦、广角易产生Radial Distortion,本质:图像的内容多而传感器的显示有限
在镜头边缘尤为明显
Chromatic Aberration (色差)
玻璃的折射率随波长略有变化
简单镜头会受到色差的影响,即不同颜色的光倾向于聚焦在略有不同的距离(模糊、色偏)
为了减少色差和其他类型的像差,大多数摄影镜头是由不同的玻璃元件(具有不同的涂层)制成的复合镜头
Vignetting(暗角)
暗角是亮度向图像边缘下降的趋势
机械暗角:光束的阴影部分永远不会到达图像
Color
- Two-types of Light Sensitive Receptors
- 视锥细胞:一共有三种,对颜色敏感
- 视杆细胞:对颜色不明感,对明暗敏感

