计算机视觉 06 3D Vision and Camera Calibration
3D Vision
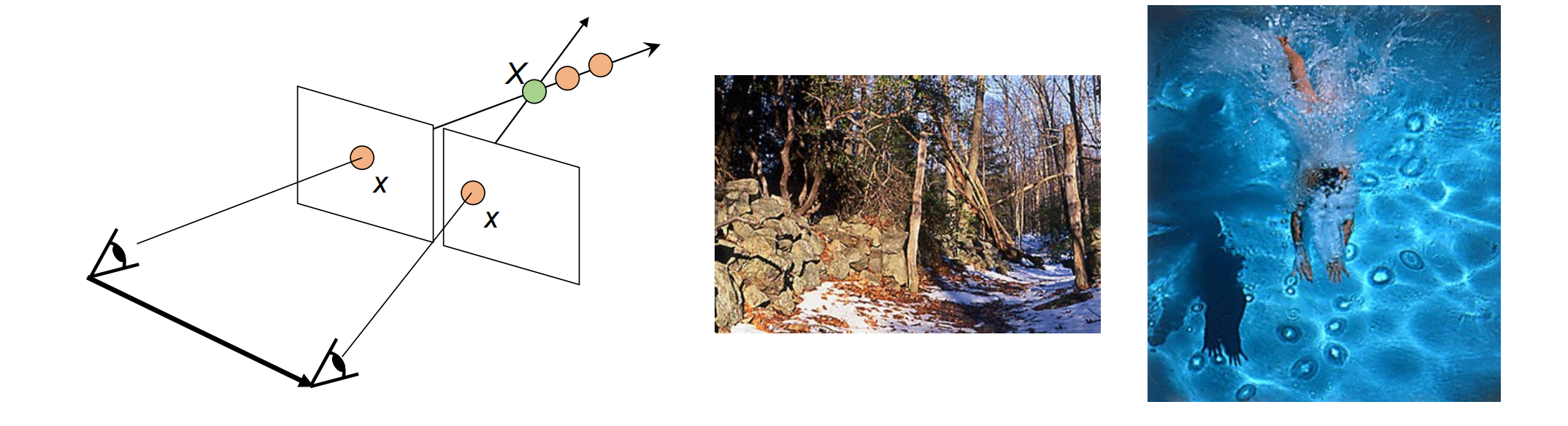
Single-view Ambiguity(单一视角的歧义性)
3D Vision:从图片中重建三维结构
关键问题:单一视角的歧义性。给定一个相机和一个图像,许多 3D 点可能会投影到同一个 2D 像素
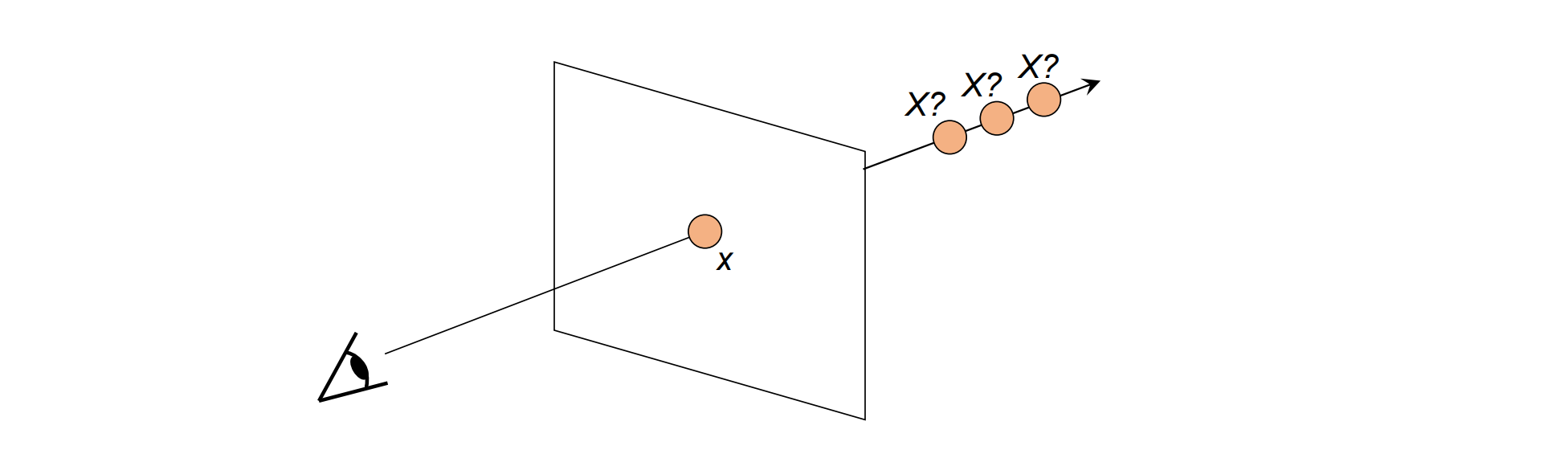
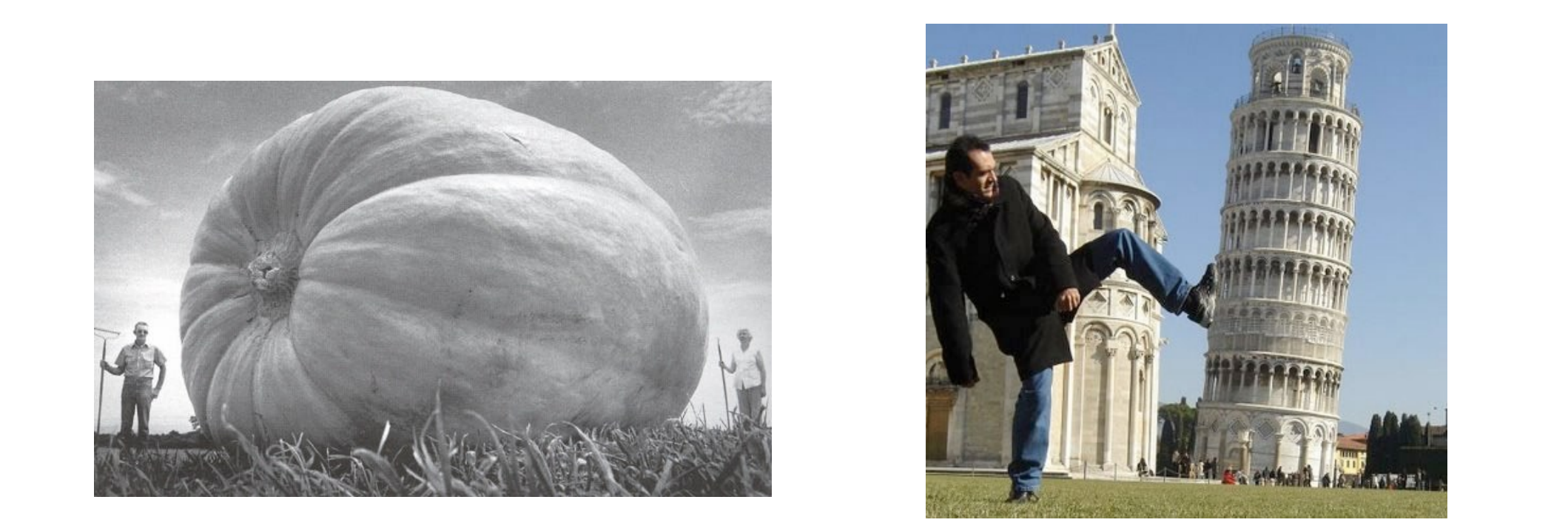
- 单一视角的模糊性使得投影具有歧义性,产生投影错觉
Resolve Single-view Ambiguity
- F1:从传感器中射出光(激光、结构光等)
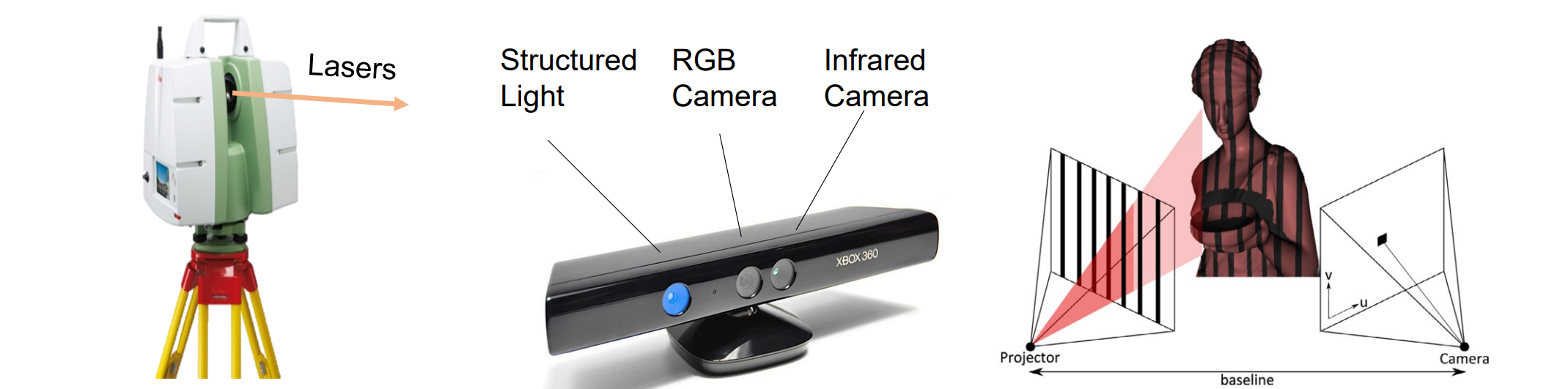
- F2:双目立体视觉:使用 2 个不同视图和对应关系的校准相机。拍两张照片,类似于双目视差进行校准
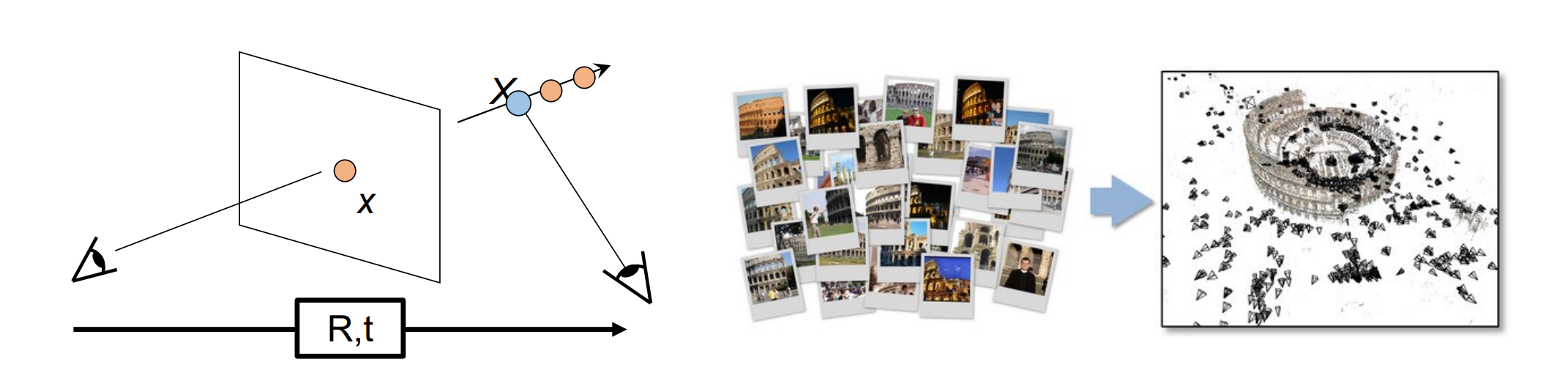
- F3:多视图几何图形:移动相机并查找对应关系以求解 X,拍摄多张照片用SIFTfeature来求解
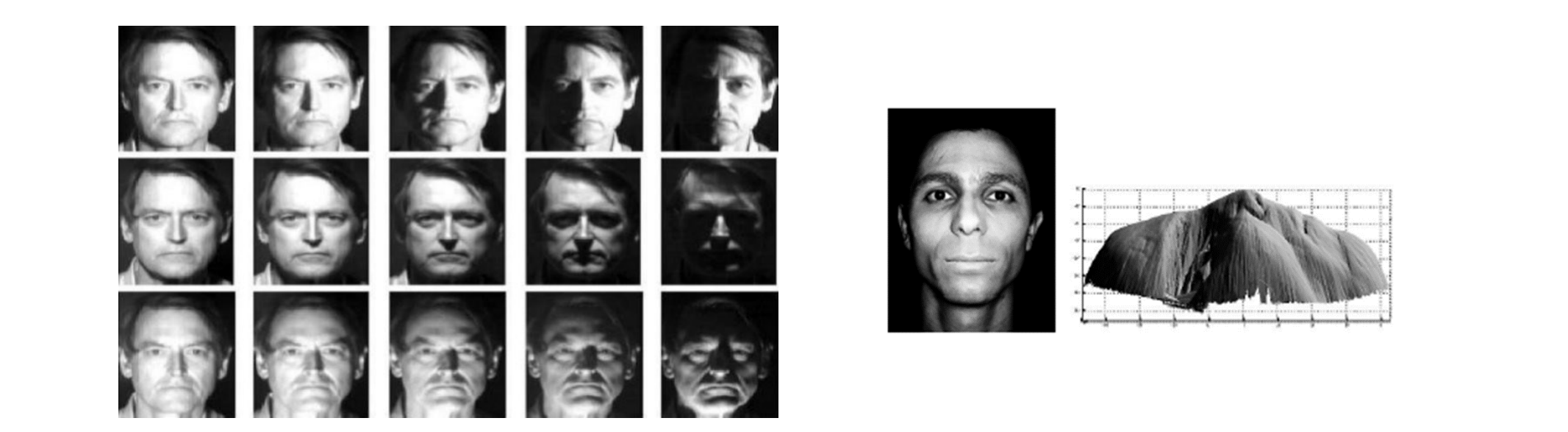
- F4:Shape from Shading(三维明暗重建三维):固定相机,并使用在不同阴影下拍摄的照片重建几何图形
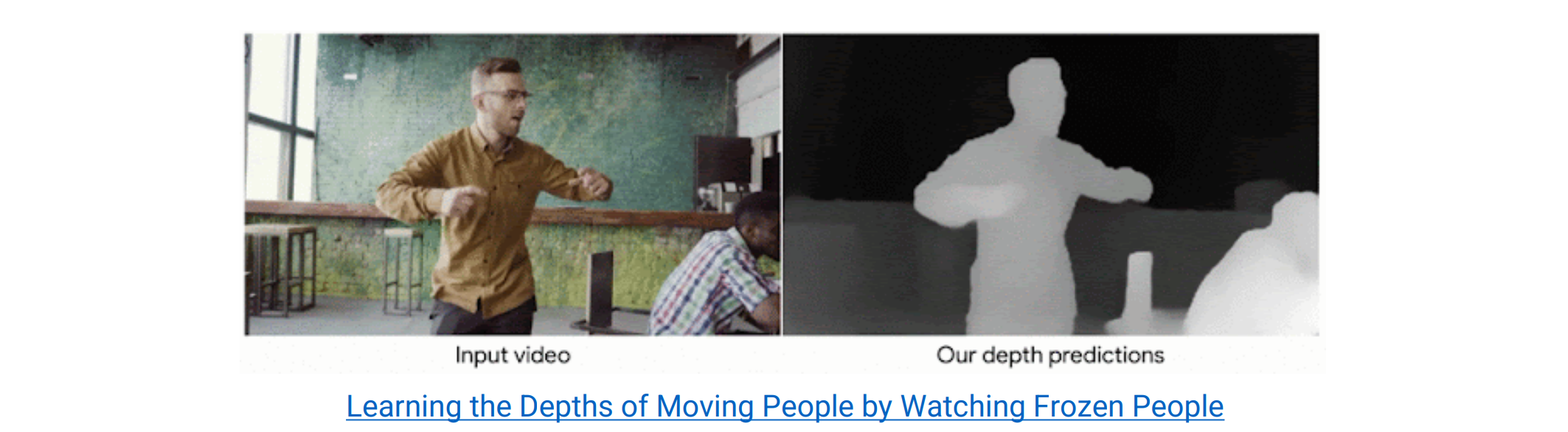
- F5:从数据中学习:训练神经网络以预测 3D 信息。用神经网络估计深度解释歧义性
Camera Calibration(相机校准)
- 核心:找匹配点
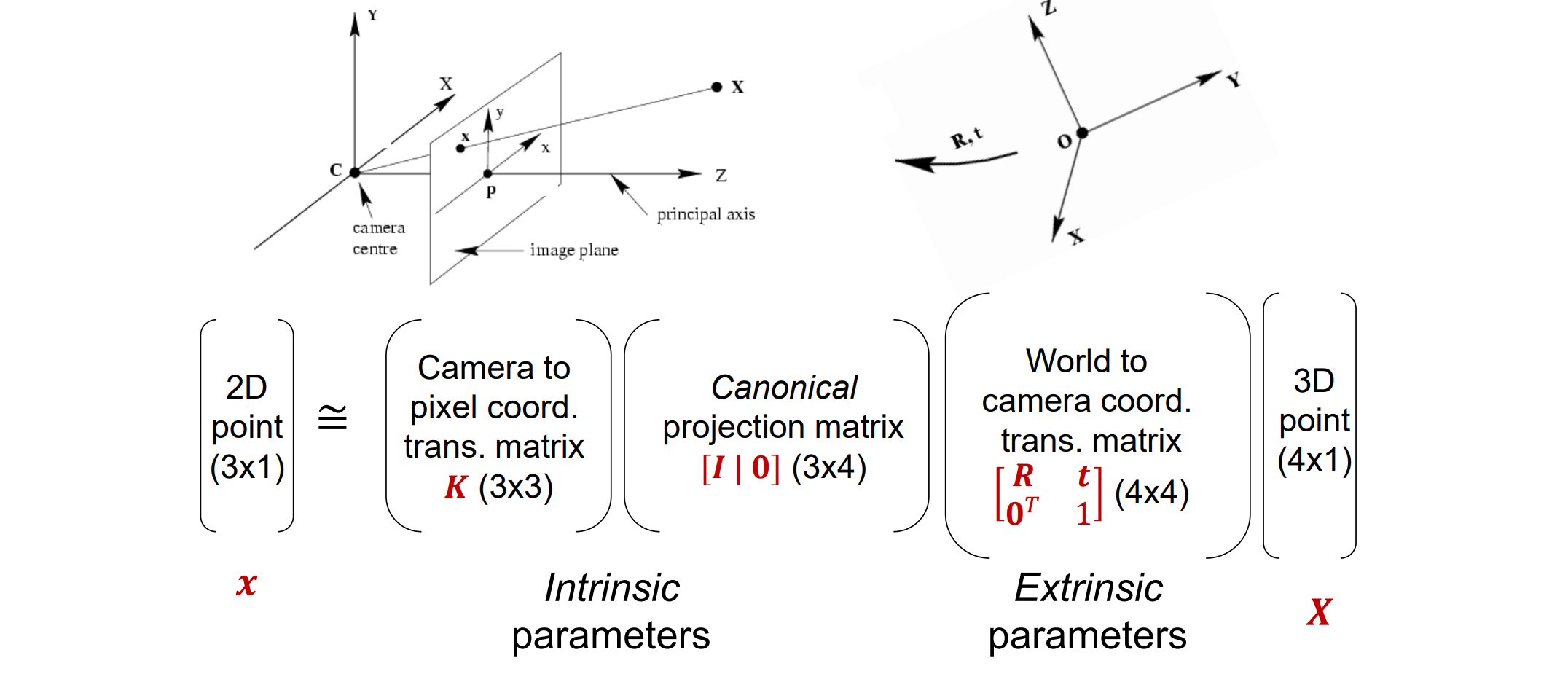
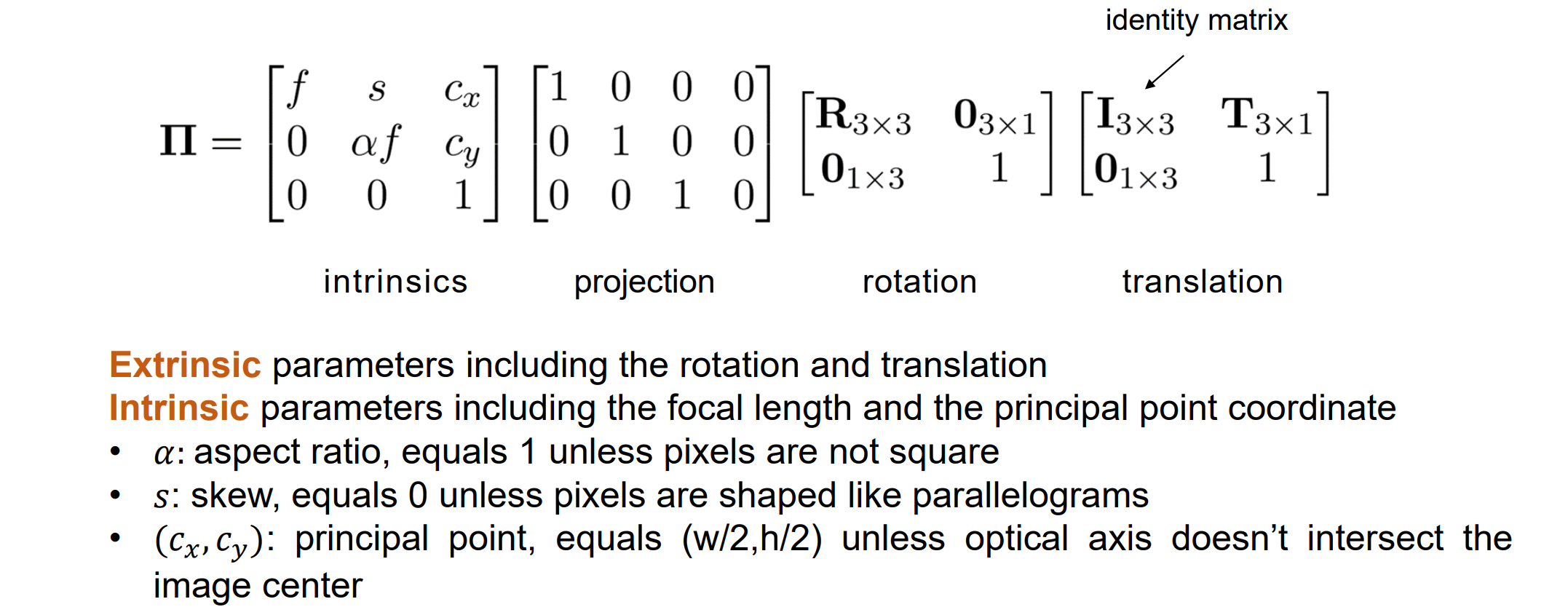
Review: Camera Parameters
Camera calibration
- 任务描述:Given 𝑛 points with known 3D coordinates 𝑿𝑖 and known image projections 𝒙𝑖, estimate the camera parameters。已知n个坐标和对应的投影坐标,需要估计相机的参数
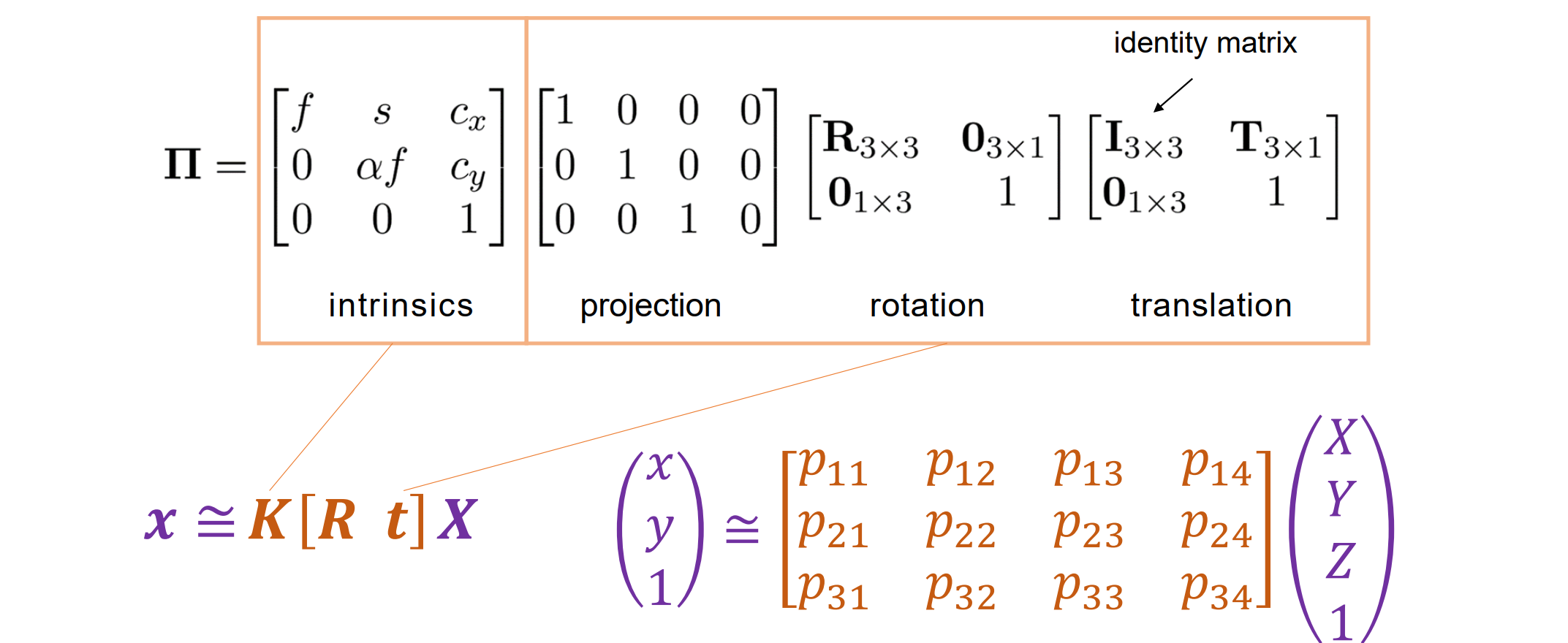
- ≌说明不考虑缩放,是其次坐标。P矩阵是参数矩阵,是未知的要进行校准的。先求P矩阵,再进行矩阵分解
Camera calibration: Linear method
- Pairs of correspondence points (𝑥𝑖, 𝑦𝑖) ↔ (𝑋𝑖, 𝑌𝑖, 𝑍i),有:
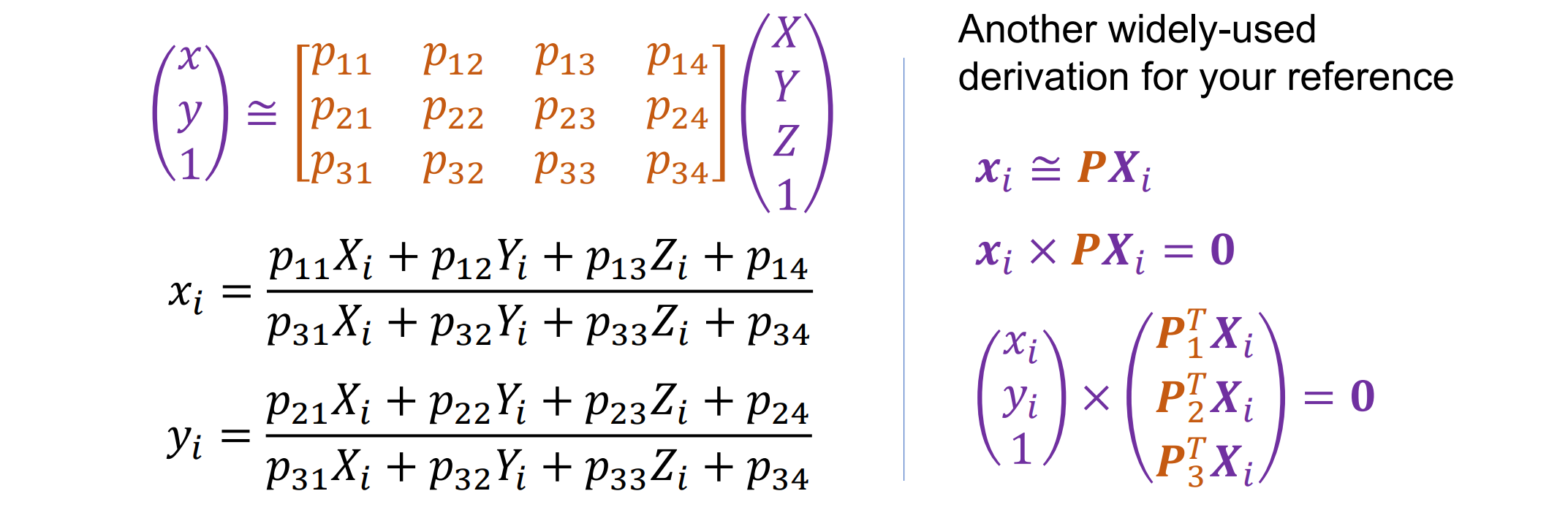
- 一共有11个自由度,至少需要6个not colinear的点。在实际应用中,我们可以在对应中找到更多的点对。通过考虑 |p|²=1 来最小化以下能量函数:

- E 是二次的,我们取它的一阶导数,让它为零:结果为A.TA的特征值最小的特征向量

Camera Calibration: Linear vs. nonlinear(从P中如何求得K,R,T)
- 线性校准很容易制定和解决,但它并不能直接告诉我们相机参数

- 观察到K是上三角矩阵,R是正交矩阵,因此可以通过RQ分解来得到K,R,T的值
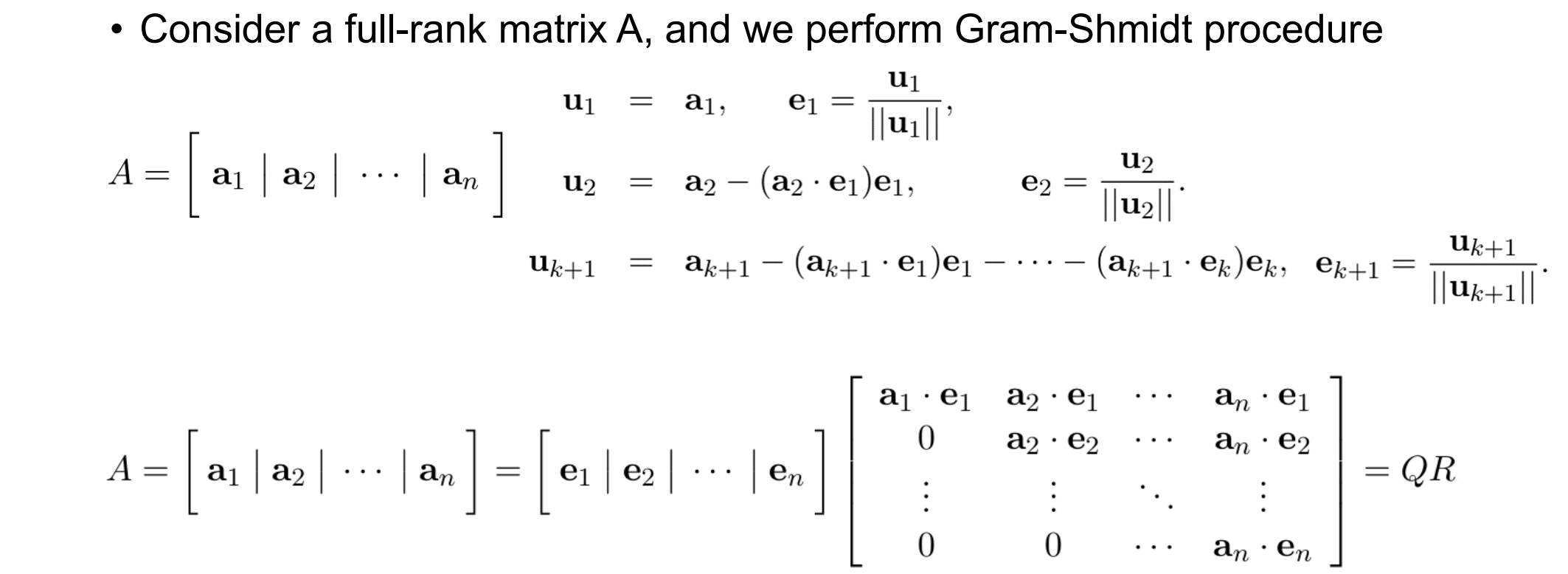
RQ分解:QR 分解是 A 列的 Gram-Schmidt 正交化,从第一列开始。RQ 分解是 A 行的 Gram-Schmidt 正交化,从最后一行开始
矩阵𝑃 = K [𝑹 | 𝒕] 的形状是 3 × 4 的。对最左侧的 3x3 矩阵进行 QR 分解,得到 K、R 。然后用 P 和 K 计算 t。求得K ^ (-1) 和P的最后一列从而得到t
在实践中,非线性方法是首选:
- 将目标函数写下实测的 2D 点与估计的 3D 点投影之间的平方距离之和:

- 可以包括径向变形和约束或其他约束
- 使用非线性优化包将误差降至最低
- 使用线性方法的输出初始化解决方案(使用 RQ 分解从 P 获得 K 和 R)
- 将目标函数写下实测的 2D 点与估计的 3D 点投影之间的平方距离之和:
Triangulation(三角测量)
- 任务描述:给定一个 3D 点在两个或多个图像中的投影(使用已知的相机矩阵),找到该点的坐标。通过求解对应点来进行三维重建
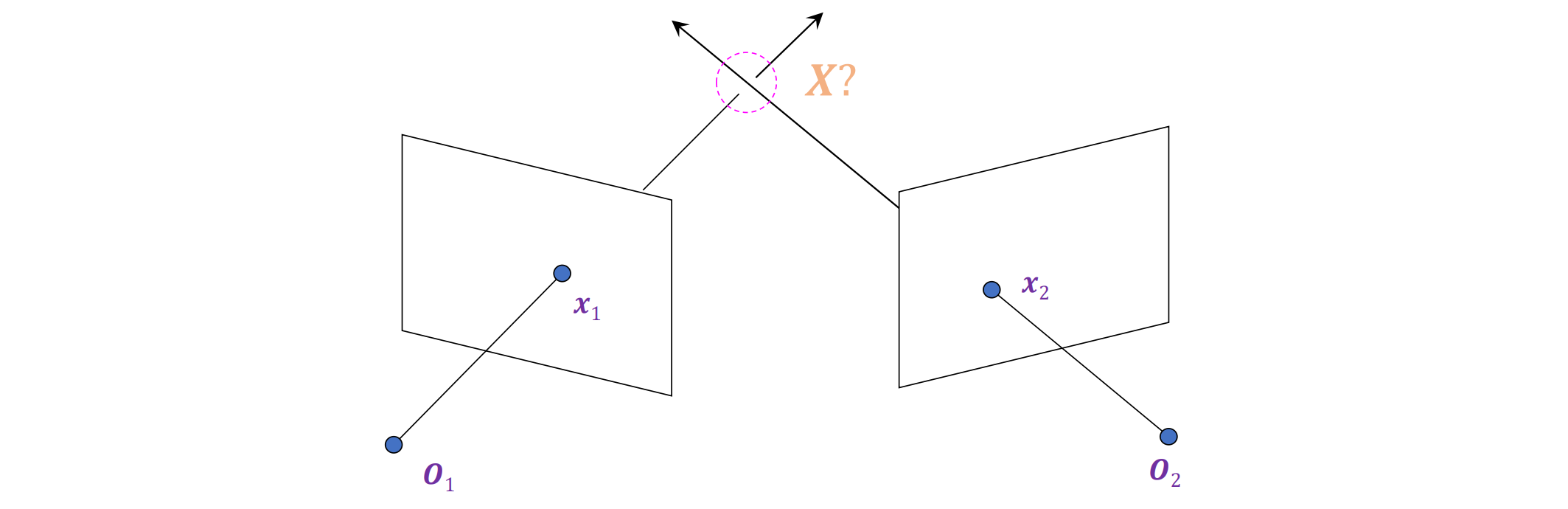
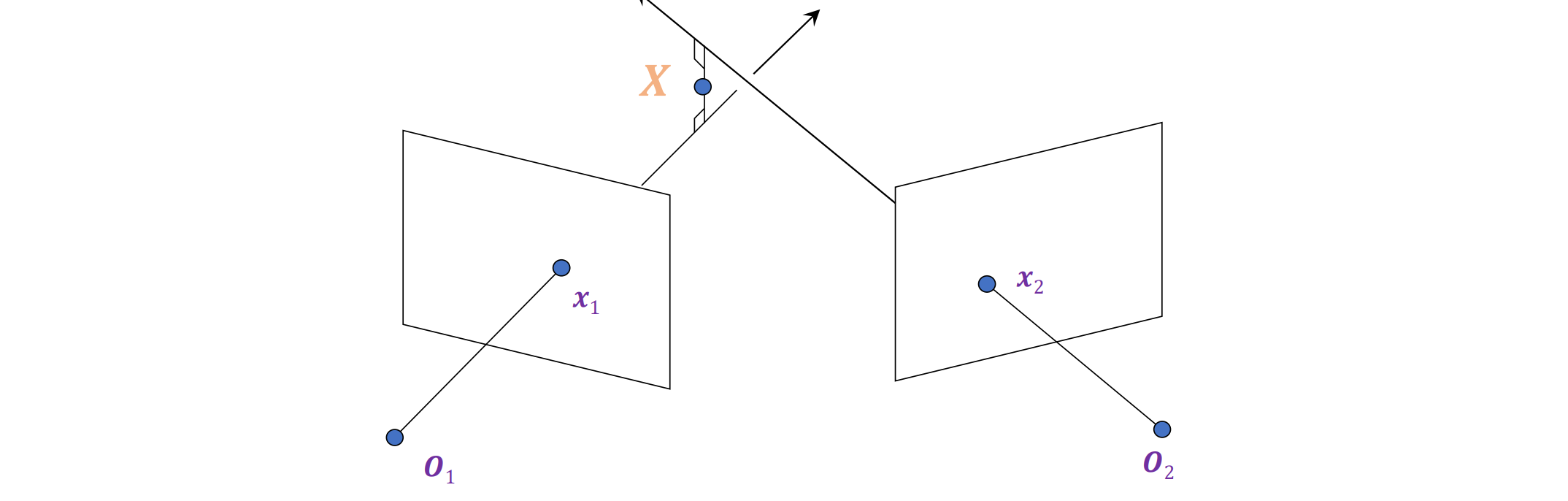
理想状态下,对应的 x1 和 x2 的两条视觉光线相交,但由于噪声和数值误差,它们并不完全相交
Triangulation #1: Geometric Approach:找到连接两条观察光线的最短线段,并设 X 为该线段的中点
- Triangulation #2: Nonlinear Approach:非线性求解找到实际投影点与x1,x2距离的差的平方之和的最小值
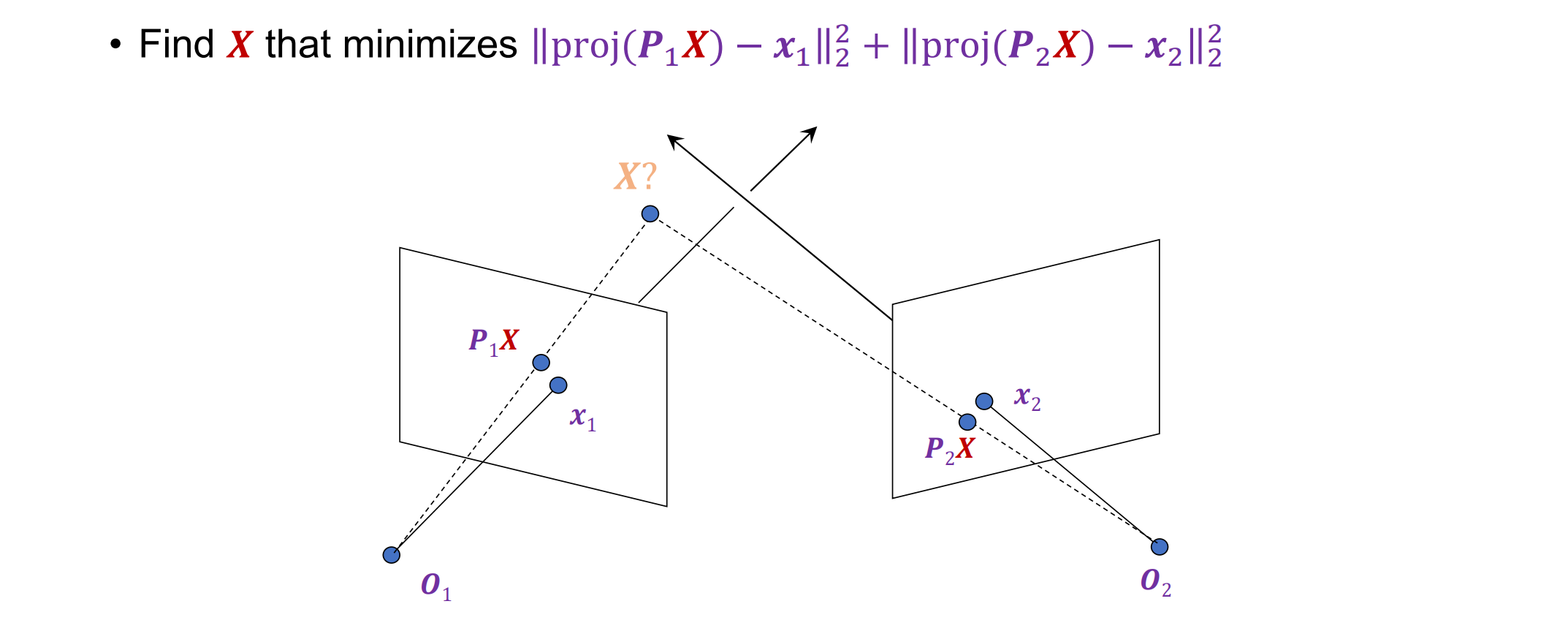
- Triangulation #3: Linear Optimization:线性优化问题,未知量为X,由于等比例缩放相等,因此可以写成叉乘形式。一个矩阵方程可以得到两个小方程。两个相机可以得到四个方程,而X有3个自由度,因此可以通过最小二乘法求解:
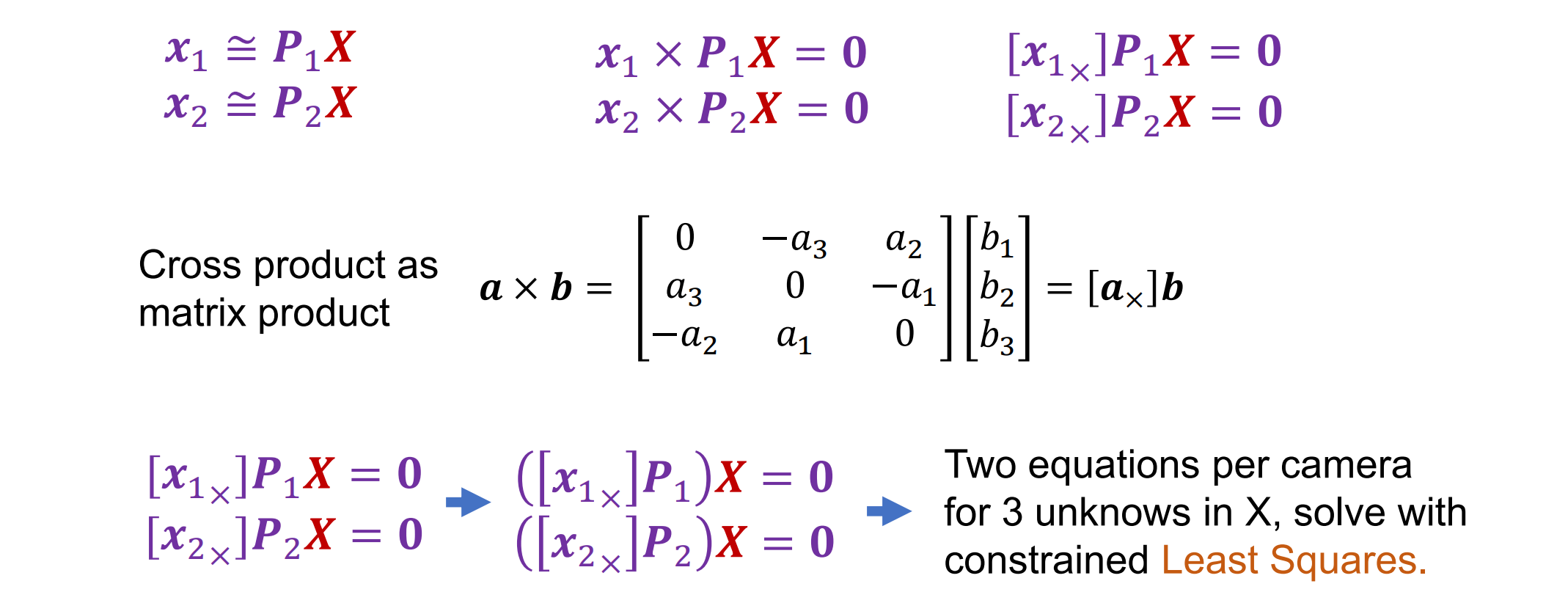
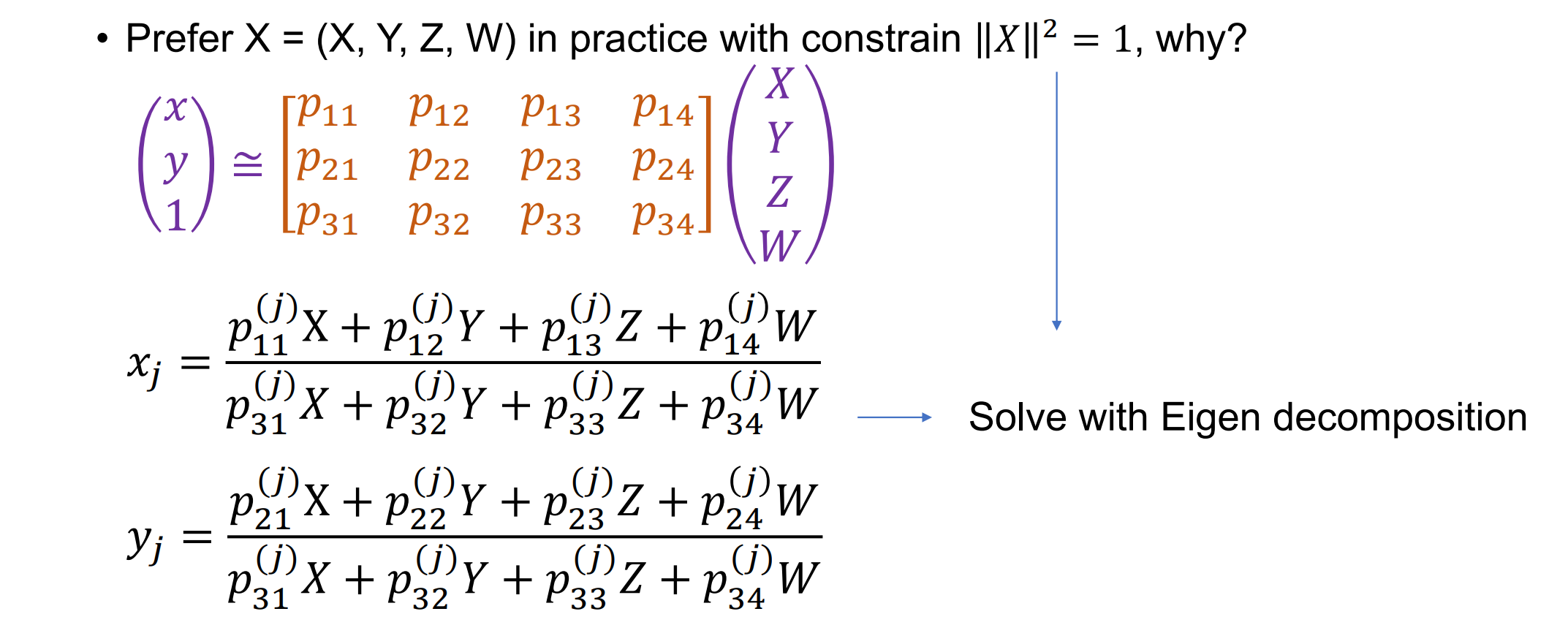
- 其中j是相机号,用特征值求解来解决问题
Calibration with Vanishing Points
- 如果不知道3D点的世界坐标,在特殊情况下,我们可以使用消失点
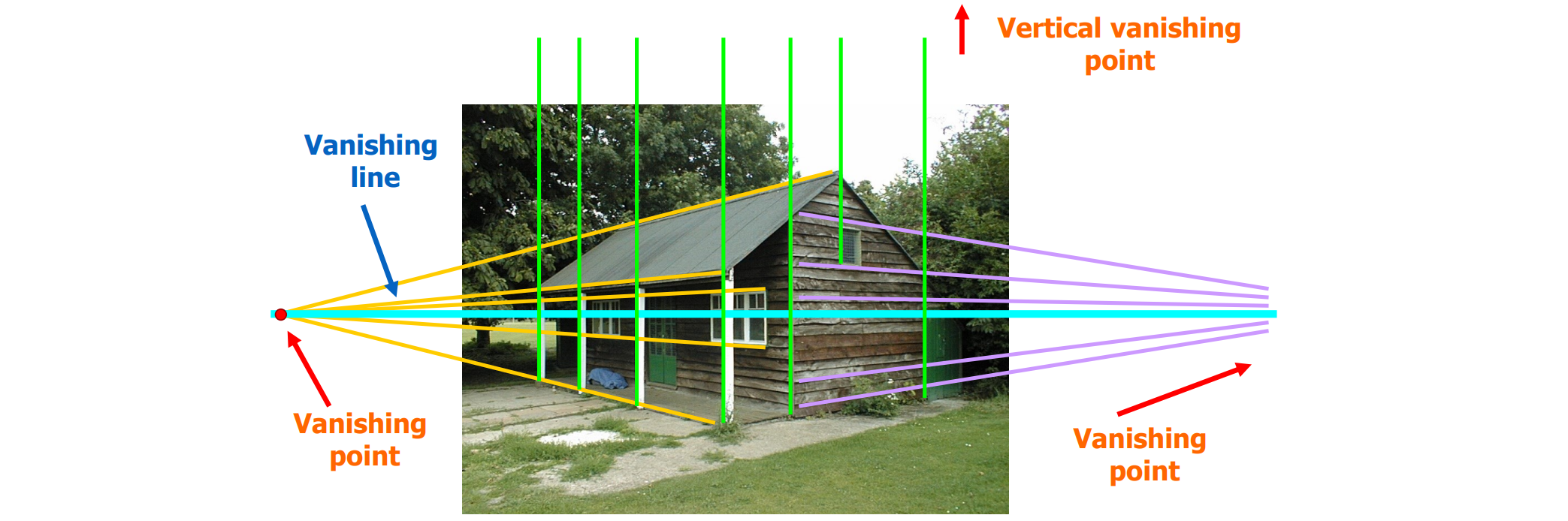
- 可以推出相机平行于绿色的Vanishing line
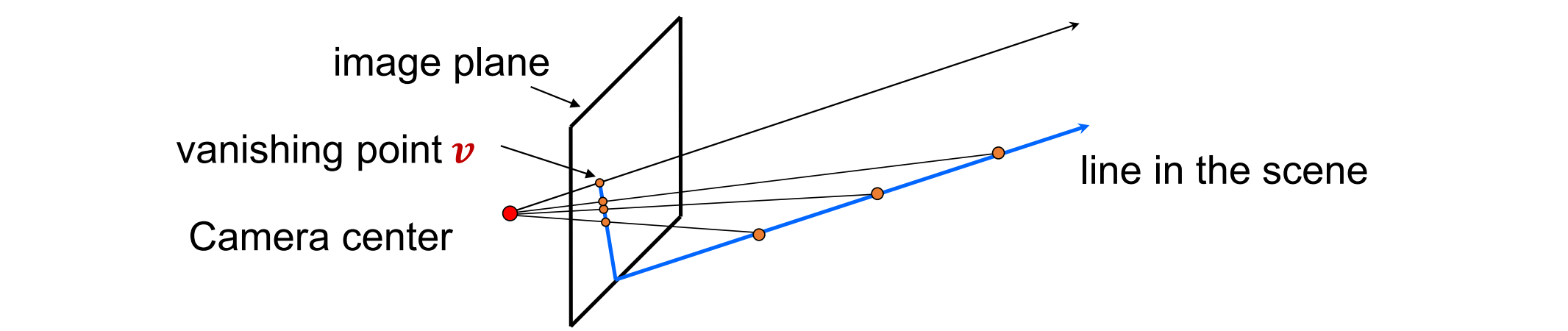
Review: Vanishing Points
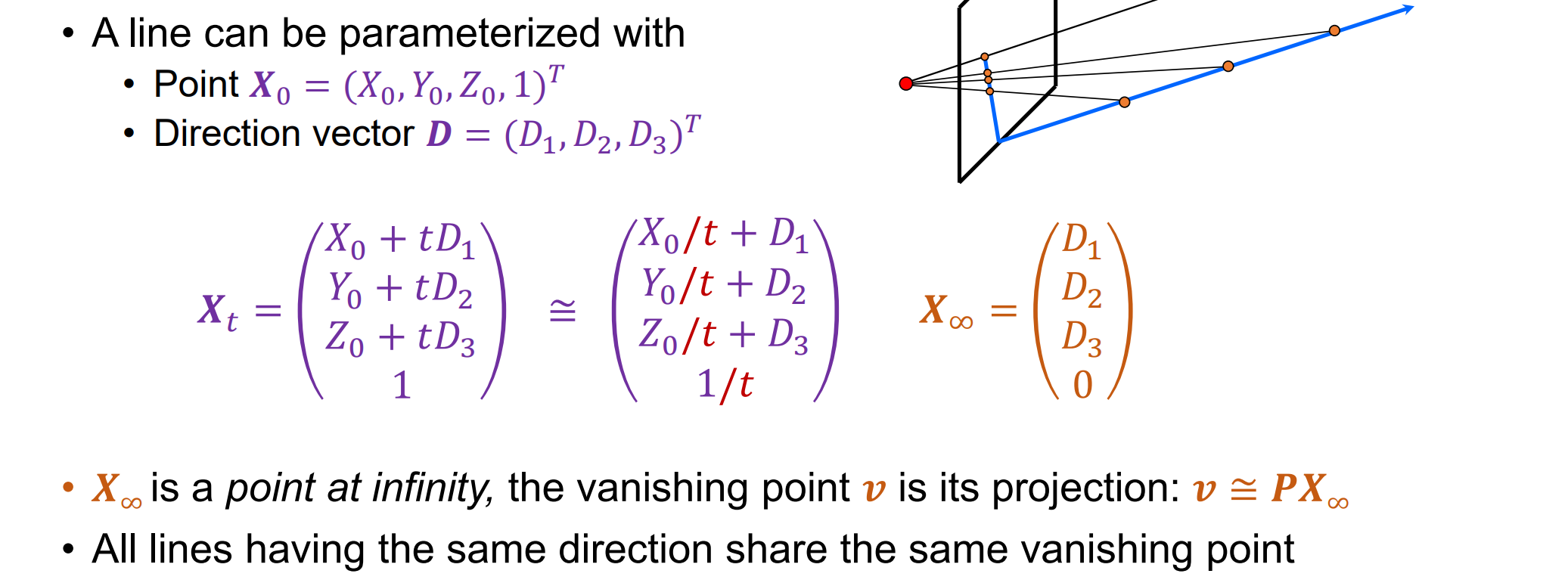
Calibration from vanishing points
- 考虑一个具有三个正交消失方向的场景。v1,v2是有限消失点,v3 是无限消失点。将世界坐标系与这些方向对齐。
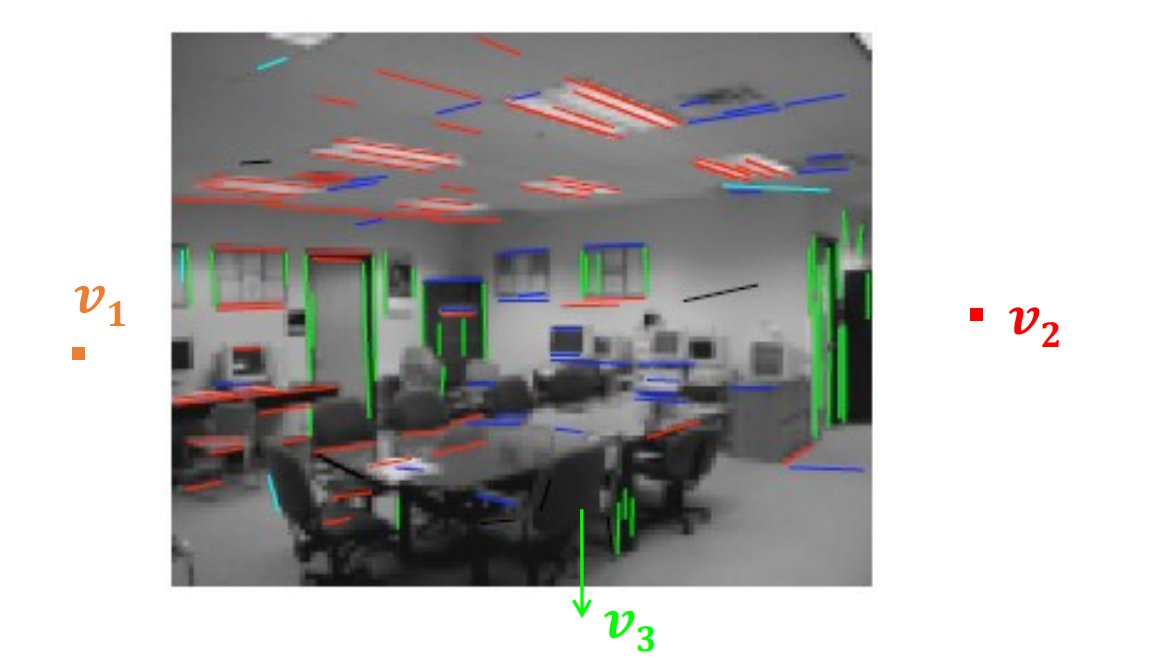
- 可以通过找直角来得到v1,v2。v3是无穷远点,相机平行于Vanishing line3,可以通过v1,v2,v3求得相机参数:
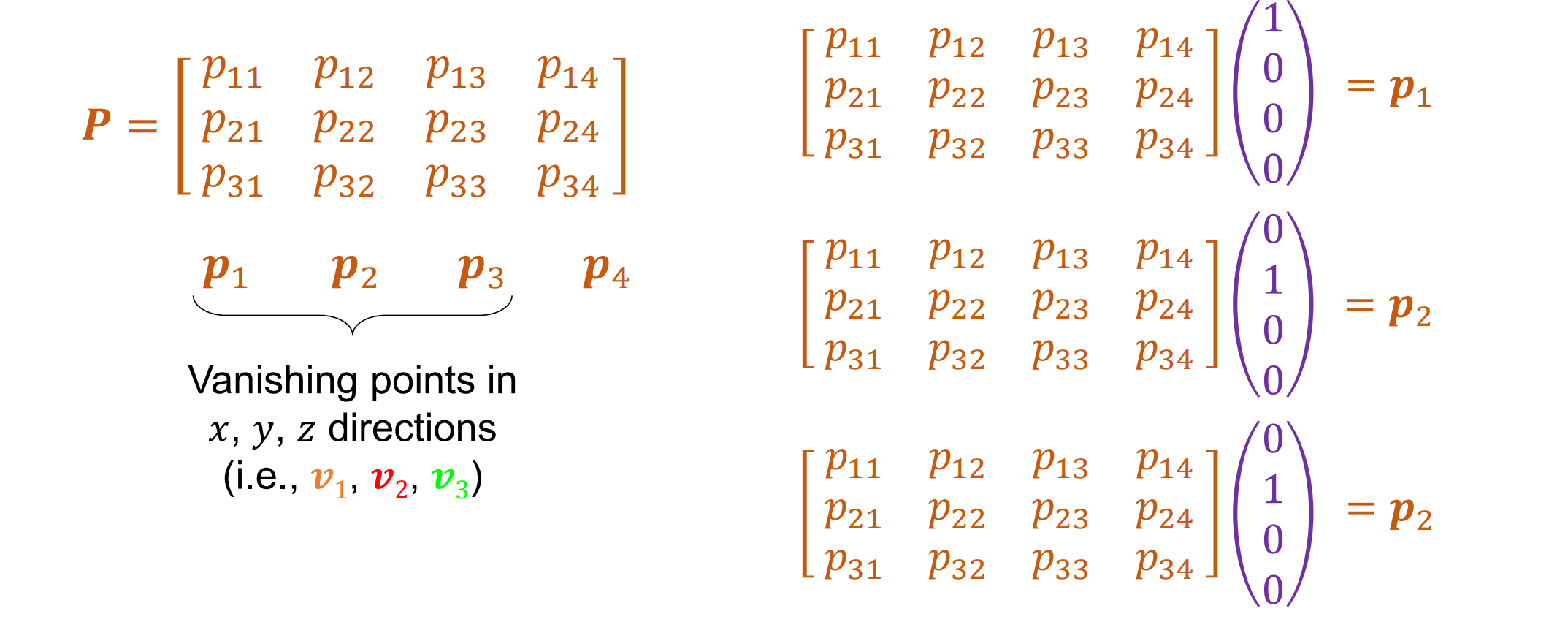
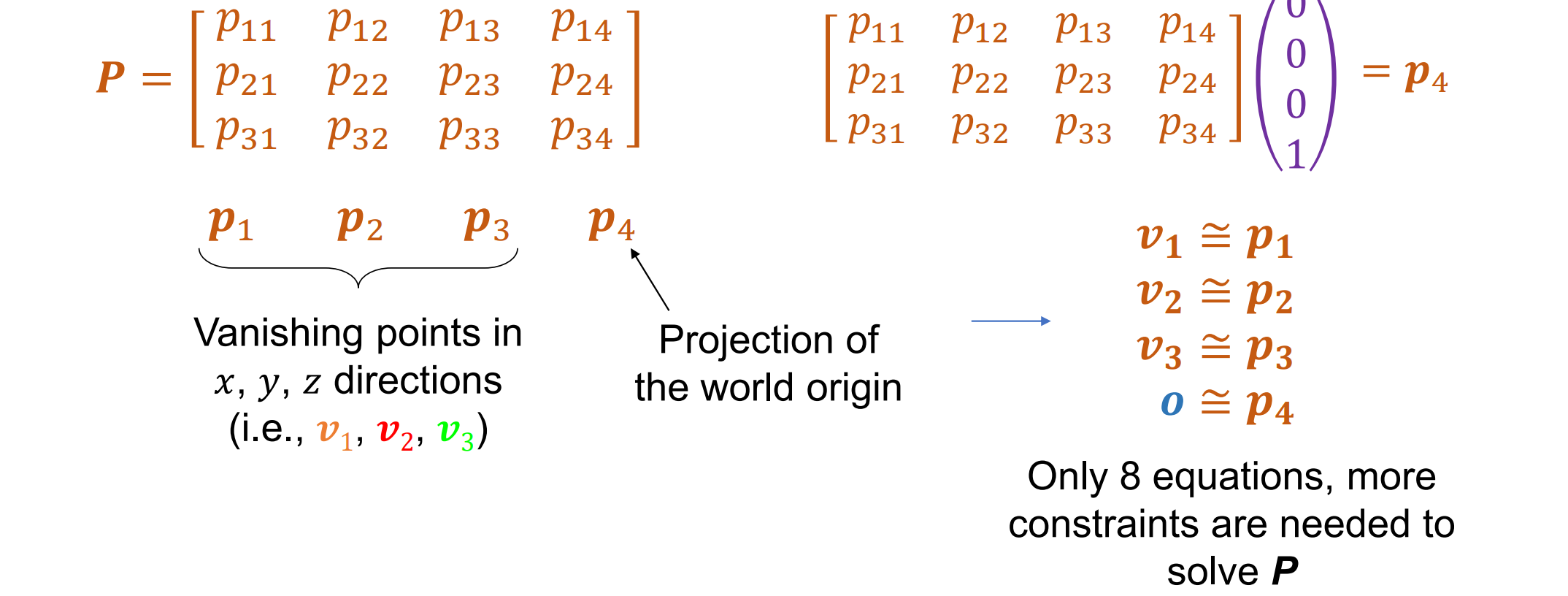
P矩阵的前三列是三个Vanishing point的坐标,而第四列是原点投影。四个方程可以得到8个小方程,但是P矩阵有12个自由度,因此仍需要约束:v1,v2的直角关系
我们将世界坐标系与场景中的三个正交消失方向对齐:

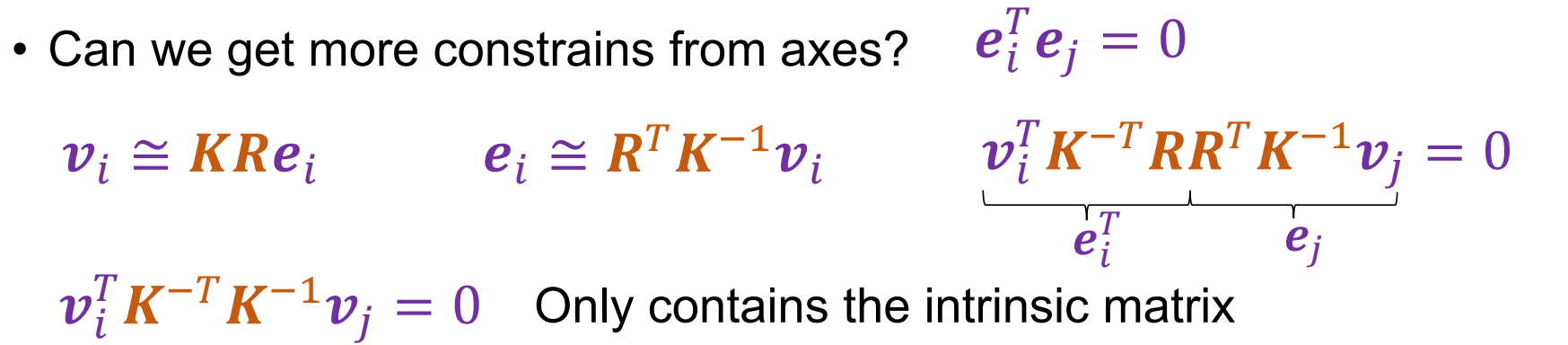
- 可以看到一对Vanishing point可以得到一个约束,因此可以得到3个约束,而内参矩阵K正好有3个自由度
一些复杂情况:
- 约束是非线性的,但并不难解决
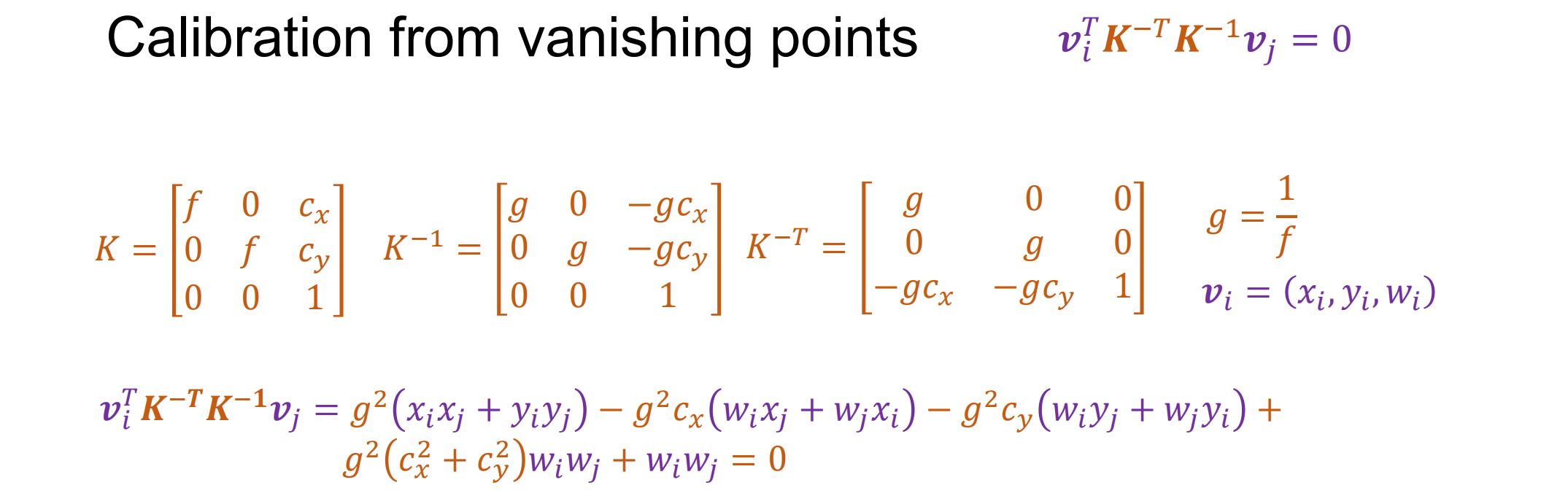
- 至少需要两个有限消失点来求解 f 和 cx,cy否则至少有一个wiwj=0从而少一个等式
Calibration from Vanishing Points:
- 使用三个正交消失点求解固有参数(焦距、主点)
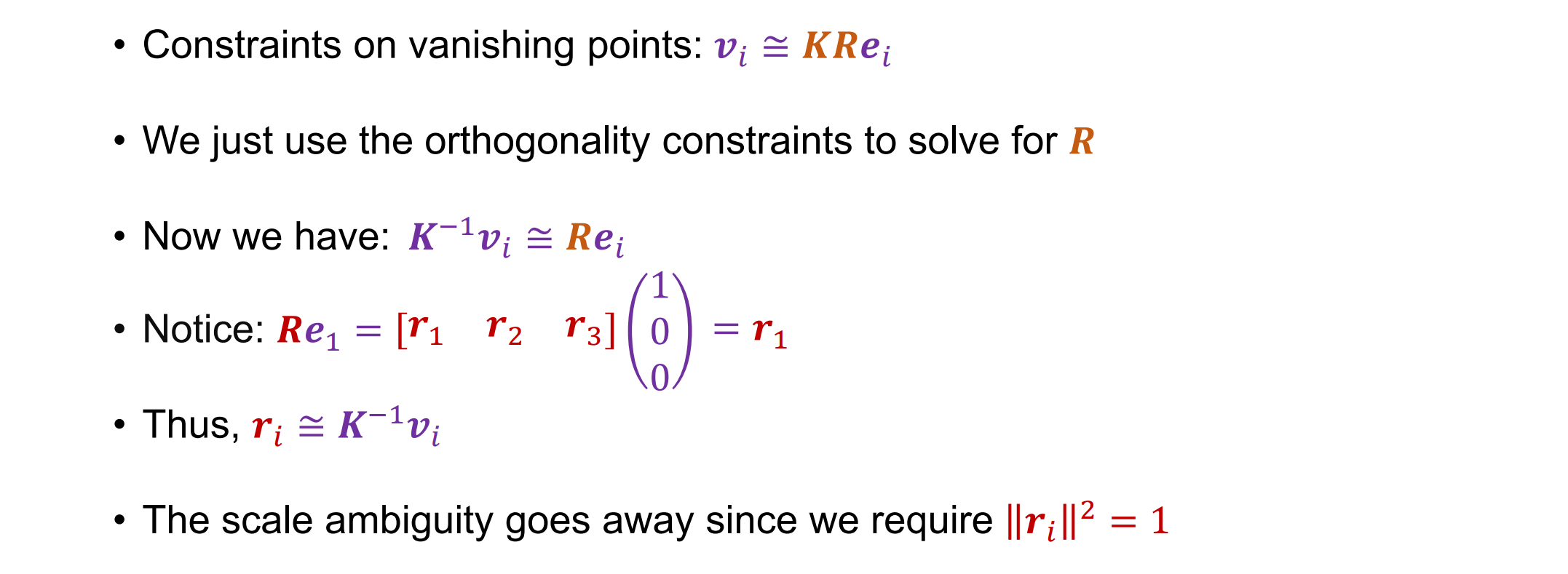
- 一旦知道校准矩阵,就直接从消失点获取外部参数(旋转)(如下所示)
- 优点:无需校准图表,2D-3D 对应关系,可以完全自动化
- 缺点:仅适用于某些类型的场景,准确定位消失点很棘手,并且至少需要两个有限的消失点
Rotation from vanishing points
Summary