

多智能体基础 深度强化学习部分考试复习
总结版:

NLP from Scratch 自学笔记
NLP From ScratchNLP From Scratch: Classifying Names with a Character-Level RNN
我们将构建并训练一个基础的字符级循环神经网络(RNN)来实现词汇分类
字符级RNN将单词作为字符序列进行读取,在每一步输出预测结果和hidden state,并将其前一步的hidden state输入到下一个步骤。以最终的预测结果作为输出,即判断该词汇属于哪个类别
我们将使用来自18种语源的数千个姓氏进行训练,然后根据拼写来预测名字的来源语言
Preparing Torch
设置 torch 默认使用对应硬件所支持的设备(CPU 或 CUDA)以实现 GPU 加速
1234567891011121314import torch# Check if CUDA is availabledevice = torch.device('cpu')if torch.cuda.is_available(): device = torch.device('cuda')torch.set_de ...
What is torch.nn really? 自学笔记
What is torch.nn really?
PyTorch通过精心设计的模块和类——torch.nn、torch.optim、Dataset及DataLoader——来协助构建和训练神经网络
若要充分发挥其能力并针对具体问题实现定制化,就需要真正理解它们内部的运作机制
为建立这种理解,我们将首先在不使用这些模型中任何功能的情况下,在MNIST数据集上训练一个基础神经网络;初始阶段仅使用最基本的PyTorch张量功能
随后,逐步每次添加一个来自torch.nn、torch.optim、Dataset或DataLoader的功能组件,清晰展示每个部分的作用,以及它们如何使代码更简洁或更灵活
MNIST data setup
使用经典的MNIST数据集,它由手绘数字(0到9之间)的黑白图像组成
使用pathlib处理路径(属于Python 3标准库),并通过requests库下载数据集
1234567891011121314from pathlib import Pathimport requestsDATA_PATH = Path("data") ...
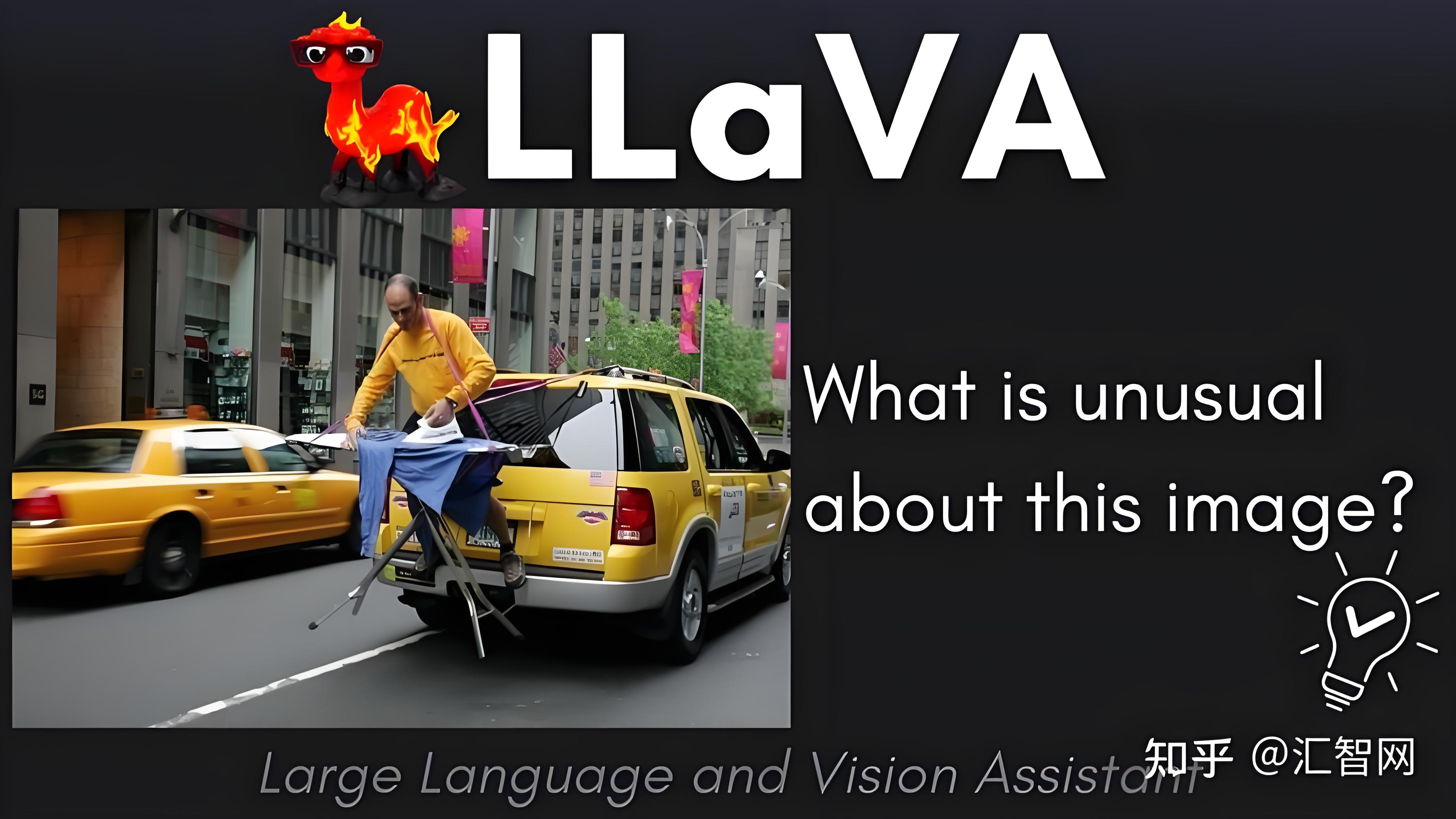
Visual Instruction Tuning
Visual Instruction TuningAbstract
使用机器生成的指令跟随数据对大型语言模型(LLM)进行指令微调已被证明可以提高在新任务上的零样本能力,但这一思路在多模态领域的探索较少
我们首次尝试使用仅语言的GPT-4生成多模态语言-图像指令跟随数据
通过在此类生成数据上进行指令微调,我们提出了LLaVA(大型语言和视觉助手),这是一个端到端训练的大型多模态模型,连接了视觉编码器和LLM,用于通用视觉和语言理解
为了促进未来对视觉指令跟随的研究,我们构建了两个评估基准,包含多样且具有挑战性的应用导向任务
LLaVA展示了强大的的多模态聊天能力,有时在未见过的图像/指令上表现出多模态GPT-4的行为,并在合成多模态指令跟随数据集上达到了GPT-4的85.1%相对分数
在Science QA上微调后,LLaVA与GPT-4的协同作用达到了92.53%的最新准确率
1 Introduction
社区对开发语言增强的基础视觉模型表现出浓厚兴趣,这些模型在开放世界视觉理解(如分类、检测、分割和描述)以及视觉生成和编辑方面具有强大能力
在这类工作中, ...
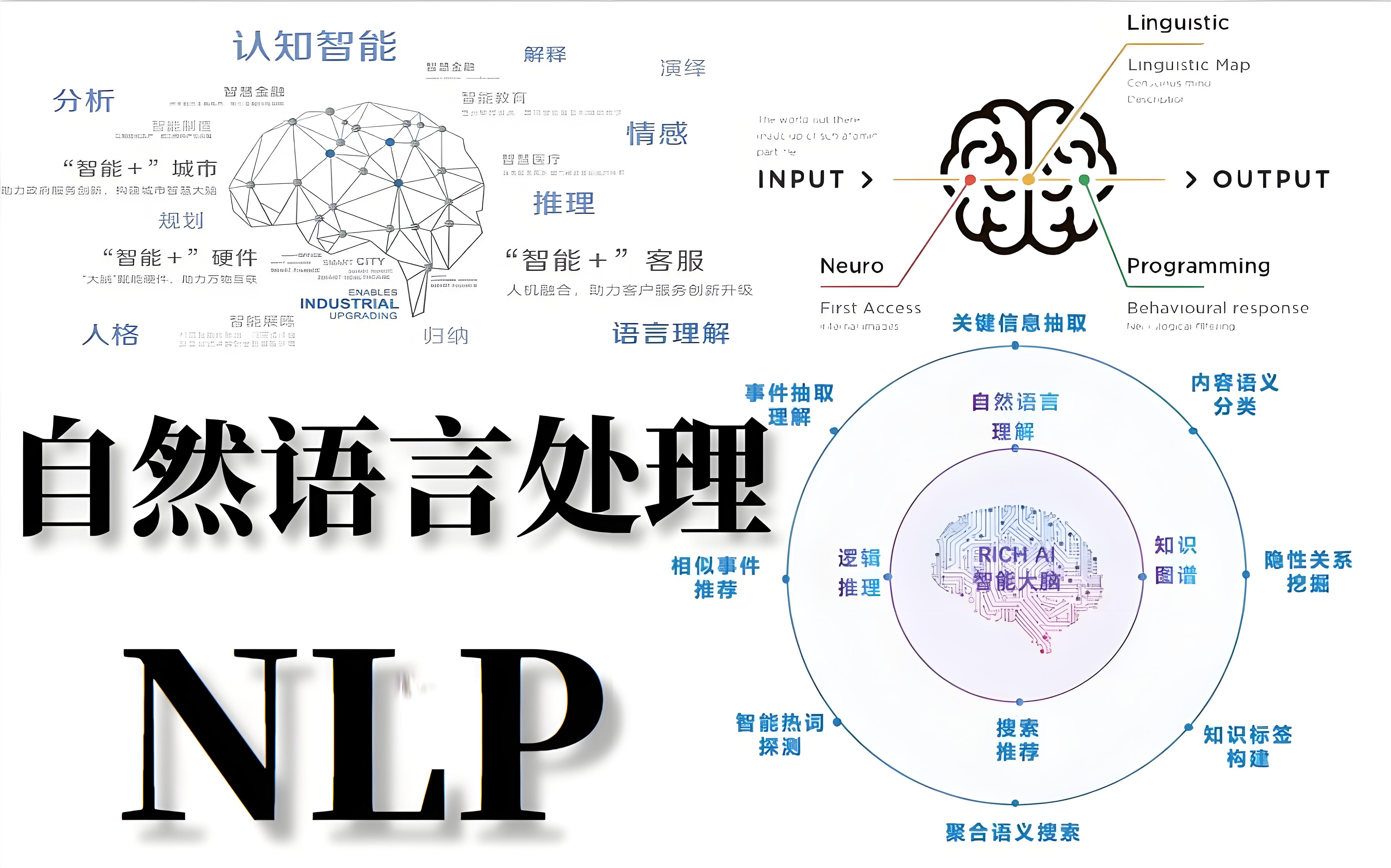
自然语言处理 lec8 dp
Syntactic Analysis IIDependency StructuresStructures
成分树:根据语法,哪个词应该和哪个词合起来
而Dependency则从宏观到微观逐渐观测,什么和什么相关 e.g.我喜欢什么,我喜欢吃什么,我喜欢吃什么样的苹果…
Predicate-Argument Structures(谓词论元):
重点考察核心的谓词之间的关系,左边是成分,右边是依存。通过依存关系来刻画意思,角色之间存在重要性的差异
In the words by Lucien Tesni`ere
句子是一个有组织的整体,其构成要素是单词
在单词和它的邻居之间存在联系,这些联系的整体构成了句子的结构
结构连接在单词之间建立依赖关系。原则上,每个连接都结合了一个上级项和一个下级项,单向的,从head -> dependency
词法项通过二进制不对称关系链接,称为依赖项
Dependency Structures
Terminology
Superior: Head/Governor(控制作用)
Inferior: Dep ...
自然语言处理 lec7 phrase
Syntactic Analysis ISyntactic Structures
讨论了词义消歧、语言模型序列(这句话好不好)、序列标注(词性是否符合语法习惯)
我们没有触及另一个有趣而复杂的话题:语法
Syntax
语言遵循一定的语法规则(隐性的),而且会不断变化:
可以编译的有一定规则和形式
没有歧义,他人能懂
同时附带语义
超越字级分析或纯序列分析
分析语法的一种可能解决方案是将句子映射到复杂的结构中(句法分析),例如树或图形。希望讨论的不再是序列而是更复杂的结构——树或图…
所需:设计计算解决方案来恢复这些具有挑战性的句法结构
来自语言学的一个很好的理论,希望能完美地描述所有的语言现象
一种将句子映射到某些目标结构的算法
目标结构的形式可以多种多样,例如序列、树、图形等
目标结构的形式可以多种多样,例如序列、树、图形等
需要一个方法来评价好坏
Theories
句法结构(语法):管理单词序列的语法或格式正确的规则,通常与某种语言有关
语义:单词、短语、句子或段落的含义是如何构建的,如何基于世界或世界的近似值(意思如何聚合)
语用(上下文相关): ...
