
计算机视觉 09 Structure from Motion
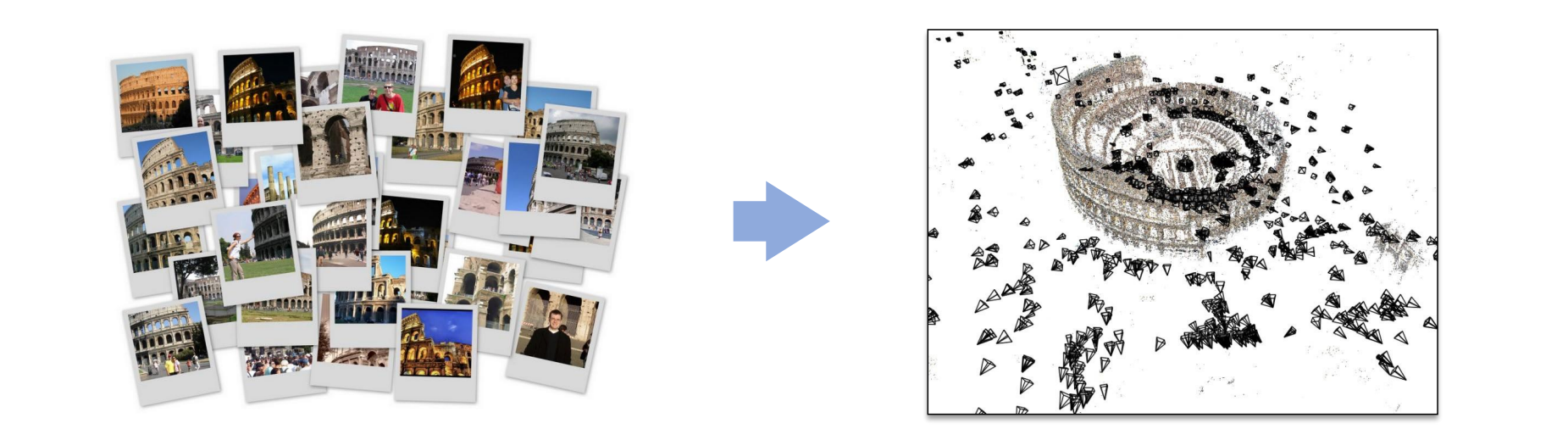
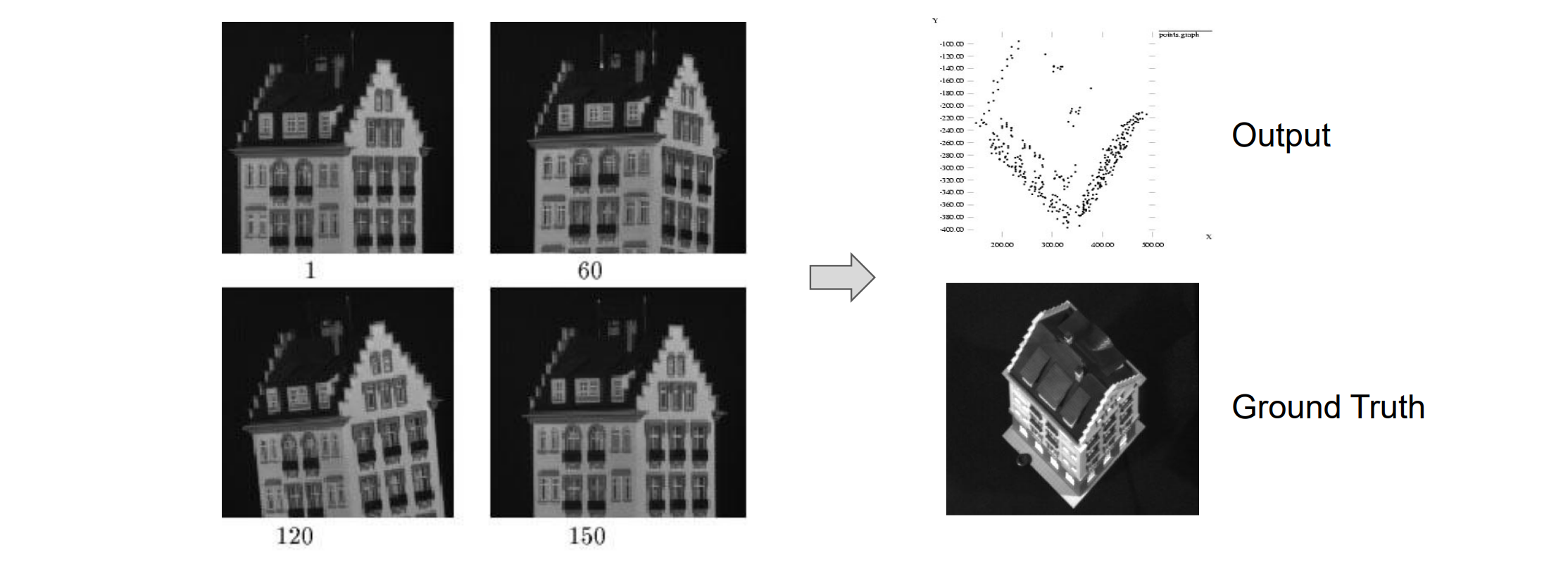
Structure from Motion
输入:多张照片
输出:相机的参数以及位置和场景的3D模型
Structure from Motion vs Calibration & Triangulation
Calibration:
- 输入:从 3D 到 2D 的点对
- 输出:相机参数
Triangulation:
- 输入:相机的参数和2D点对
- 输出:3D点
Structure from Motion
- 输入:2D到2D的点对
- 输出:3D点以及相机参数
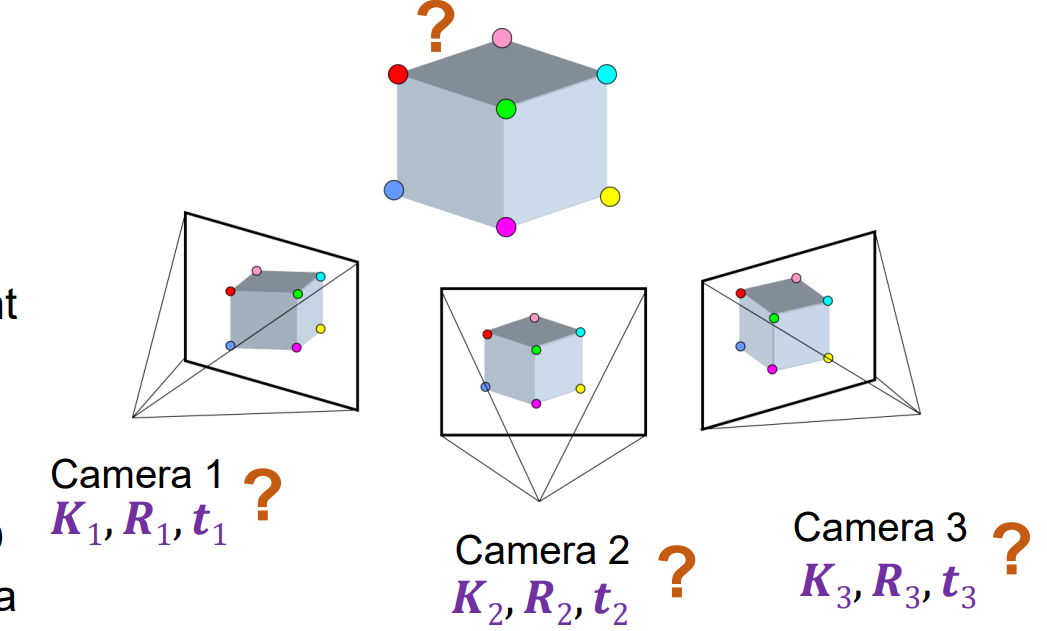
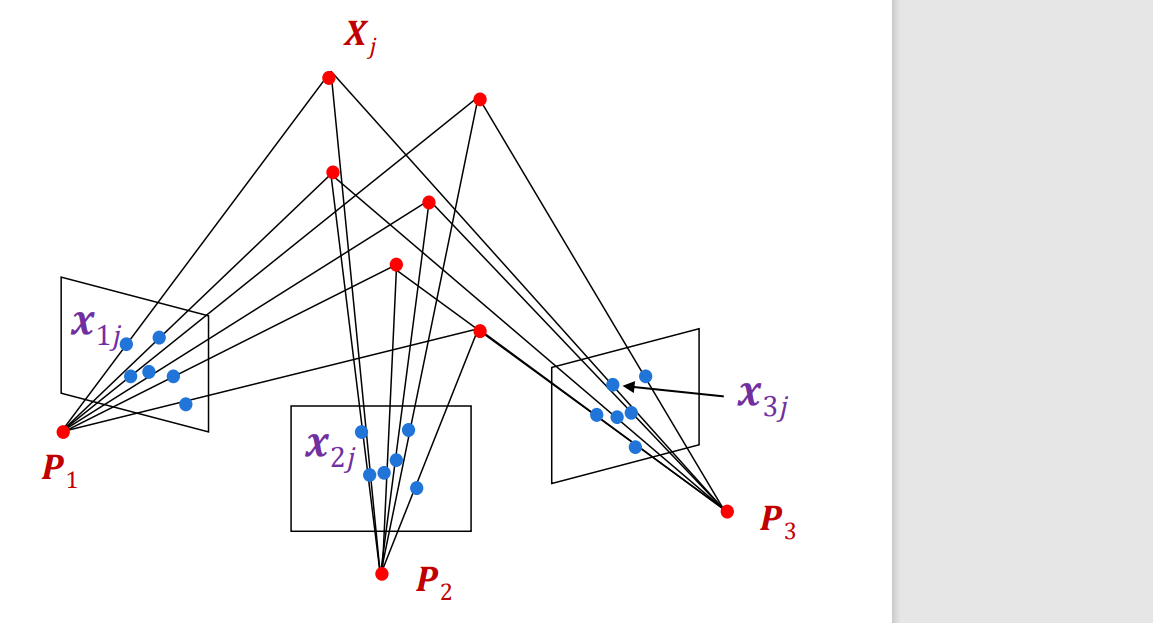
Structure from Motion: Problem formulation(问题设置)
- 输入:n 个固定 3D 点的 m 个图像(忽略可见性),使得:Pi是第i个相机的参数,Xj是3D其次坐标,二者均为未知。Xij是第i张图片的投影点

- 输出:估计 m 个投影矩阵 Pi 和 n 个 3D 点 Xj 来自 mn 对应关系Xij
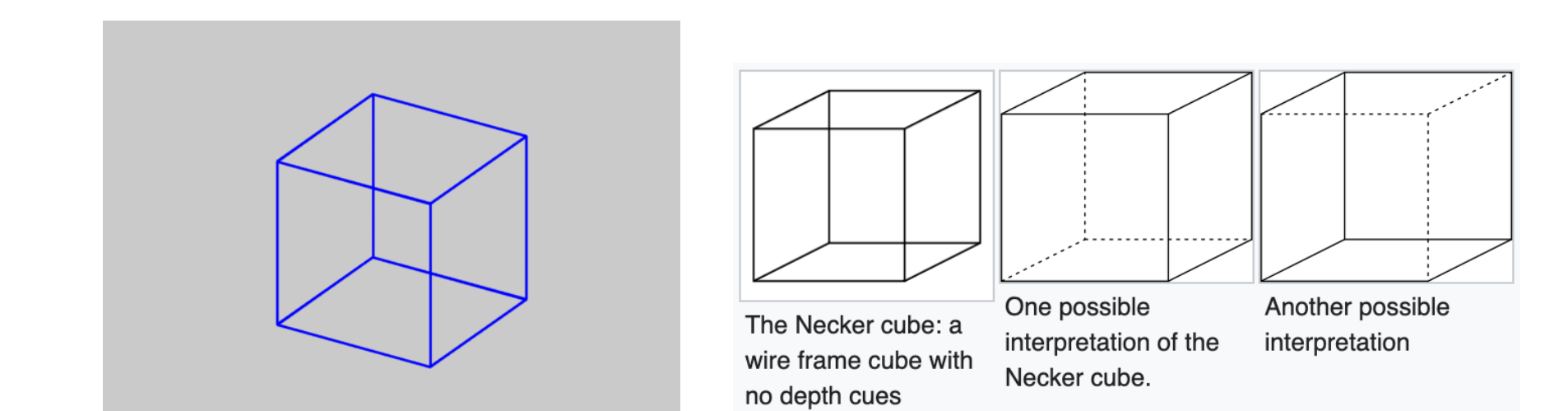
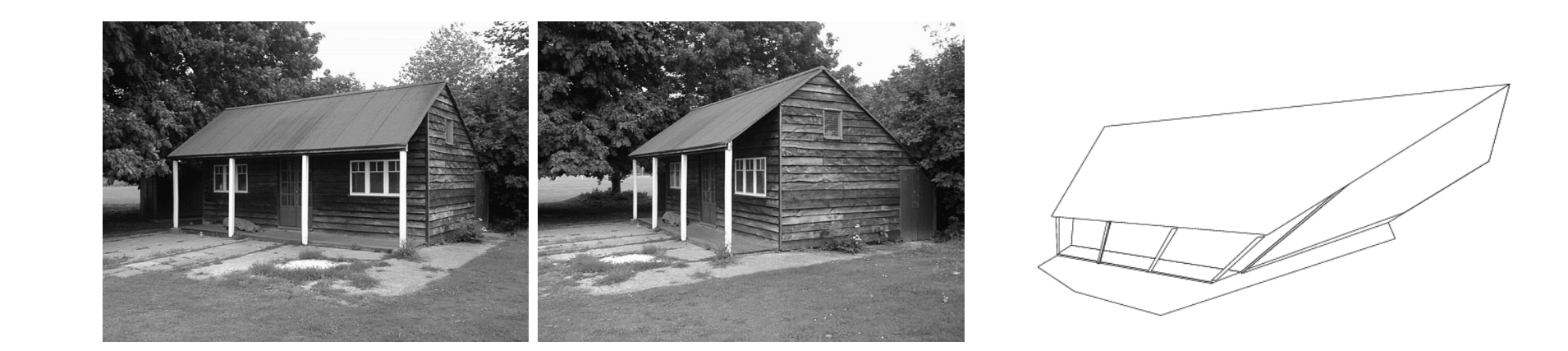
The Ambiguity of Structure from Motion
- SFM有歧义性是不可解的,因此必须加以约束才可解出唯一值,否则会得到一族解。例如下图对同一个场景,相机既可能来自右上方,也可能来自左下方
- 缩放歧义性:将场景缩放 k 倍,并将摄像机矩阵缩放 1/k,然后场景的投影将保持完全相同。没有参考测量,就无法恢复场景的绝对比例,只能重建相对尺寸不变

- 如果我们使用变换 Q 变换场景并将逆变换应用于相机矩阵,则图像观测值不会改变:

Projective Ambiguity
- Q没有任何约束的时候,会产生投影歧义性
- 此时Q是4x4满秩矩阵
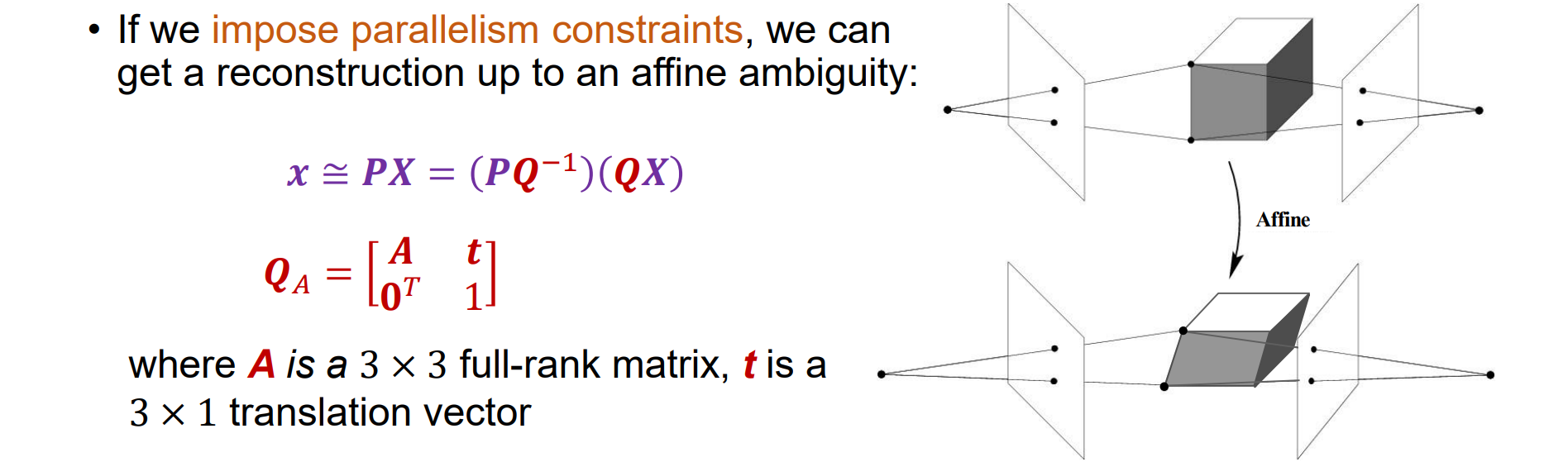
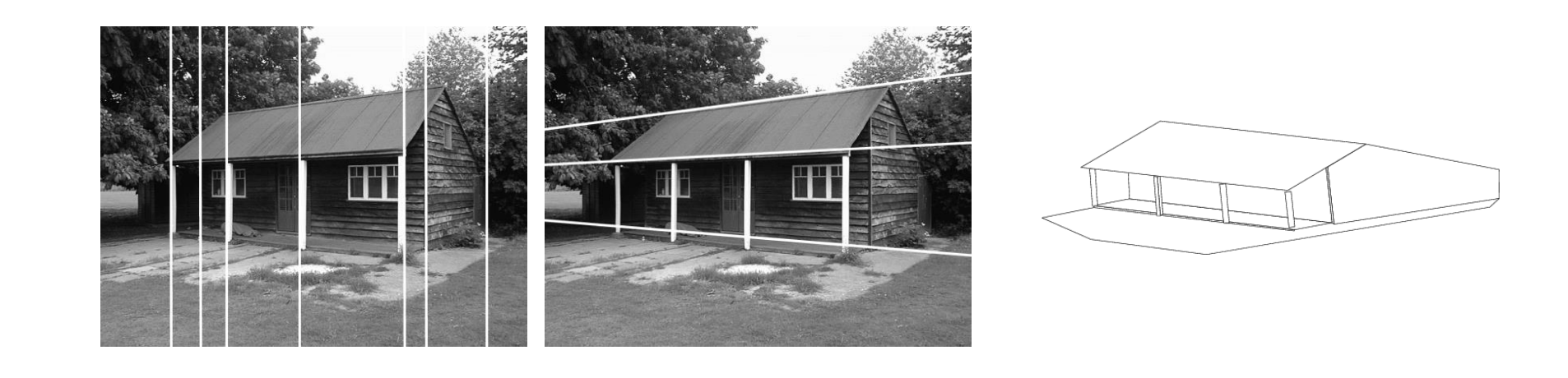
Affine Ambiguity(仿射歧义性)
- 如果我们施加并行约束,我们可以得到一个达到仿射歧义性的重建。约束Q的最后一行为[0…0,1],仿射歧义性能保持平行关系
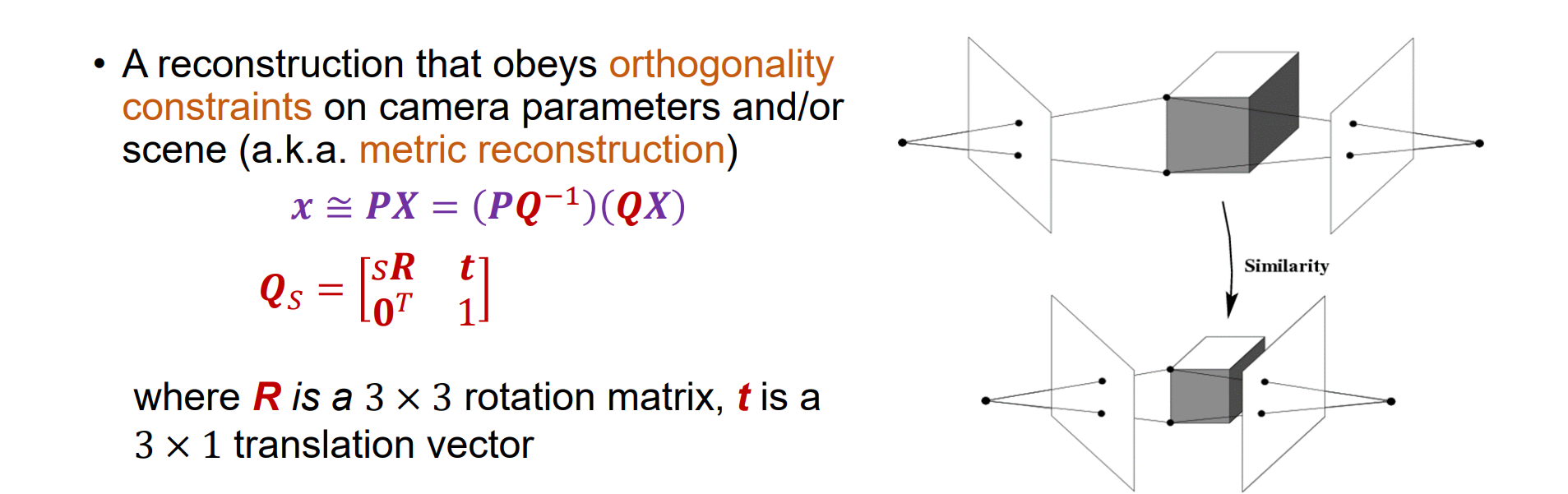
Similarity Ambiguity(相似歧义性)
- 遵循摄像机参数和/或场景的正交性约束的重建(也称为度量重建)。限制Q只包含缩放,旋转或平移可重建达到相似歧义性。能保证直角不变,和真实世界保持相似关系

Affine Structure from Motion
- affine or weak perspective cameras(弱视角相机):假设相机距离物体很远的时候,可以近似用正交矩阵估计投影矩阵以简化数学计算
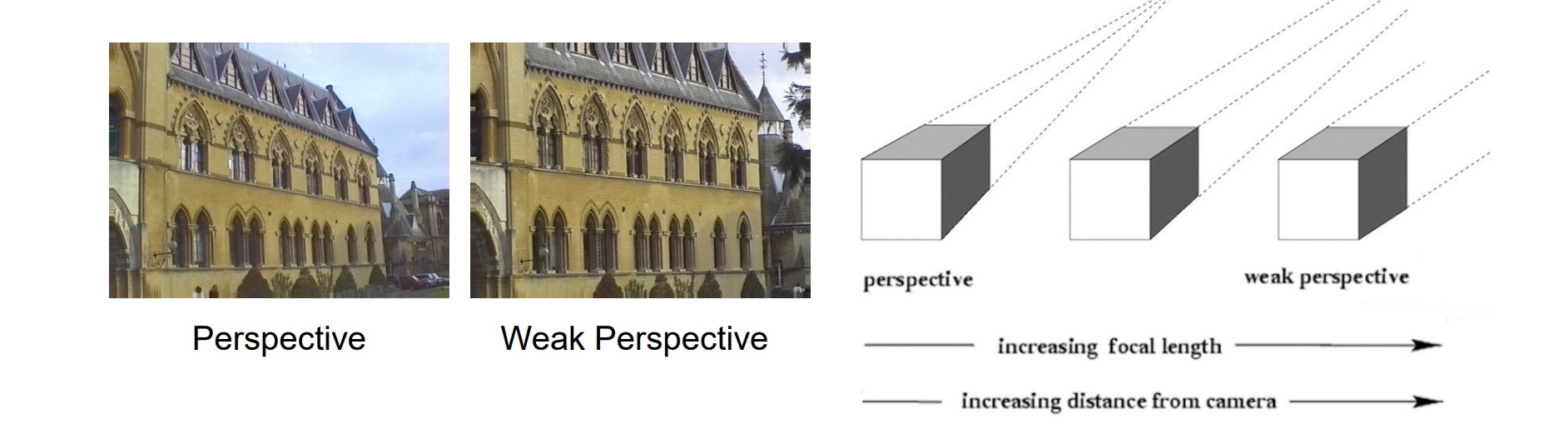
- 正交矩阵:丢弃掉3D点的Z坐标
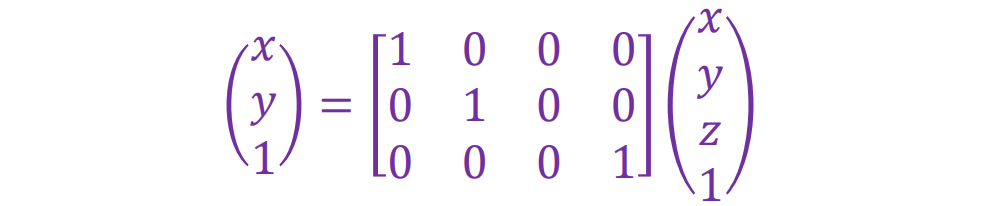
Affine Camera
- 在正交投影下,相机矩阵可以写成如下形式。其中第一个矩阵代表内参,即2D仿射变换,第二个矩阵为正交投影矩阵,第三个矩阵对应3D齐次坐标变换

将此相机称为仿射相机,将用它来执行 SFM
投影矩阵是 3D 到 2D 线性映射加上平移:,写成分块矩阵形式如下:其中,t是平移量
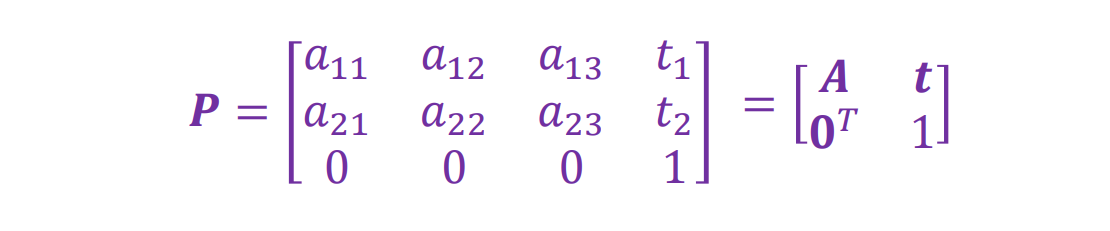
- 在非齐次坐标中:其中将第一行记为a1,第二行记为a2,则a1,a2为投影矩阵的两个基(投影轴),写成AX+t可得t是世界坐标系的原点坐标的投影(t1,t2)

- Affine Structure from Motion给出n 个固定 3D 点的 m 张图像,使得:其中红色部分的A,X,t都是未知

使用 mn 对应关系 xij 估计 m 个投影矩阵 Ai 和平移向量 ti 和 n 个点 Xj
重建定义为具有 12 个自由度的任意仿射变换 Q:


一个点关于x,y各得一个方程,一个点得到两个方程
2mn个已知变量(xij),8m+3n个未知变量(Ai,ti和Xi)
为了能够解决这个问题,我们必须有 2mn ≥ 8m + 3n − 12,因为仿射歧义性带走了 12 个自由度
而对于两个图片,即m=2,可得n≥4,至少需要4个对应点
化简技巧1: centering:通过减去每个视图中图像点的质心来使数据居中,即将投影点归一化。先计算平均点,再将原点平移到平均点的位置
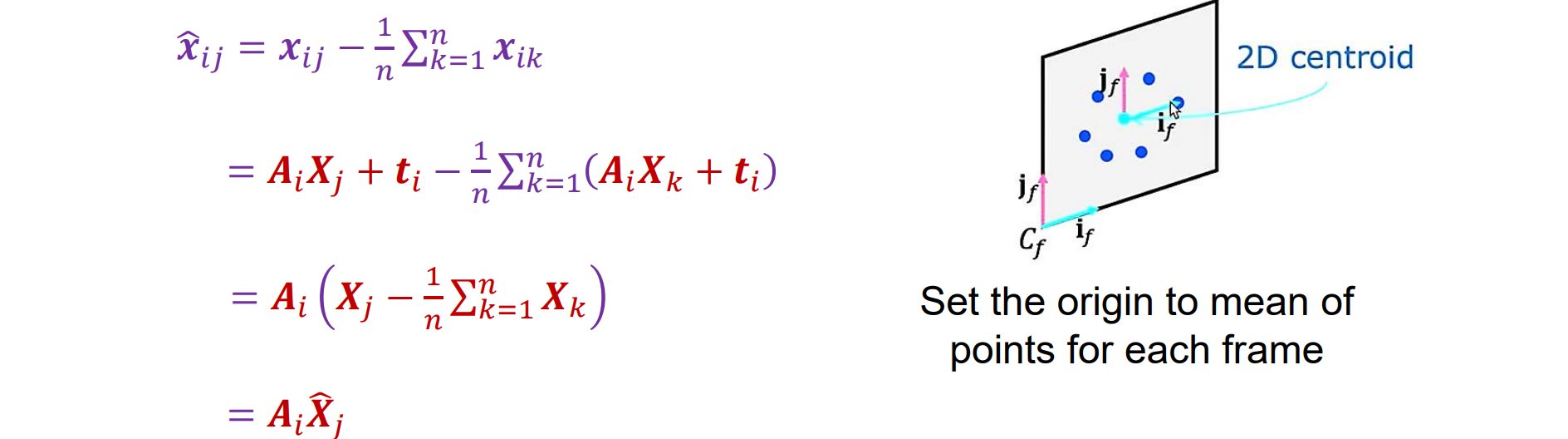
- 通过将世界坐标系的原点定义为 3D 点的质心,无需将 3D 数据居中(和平移歧义)
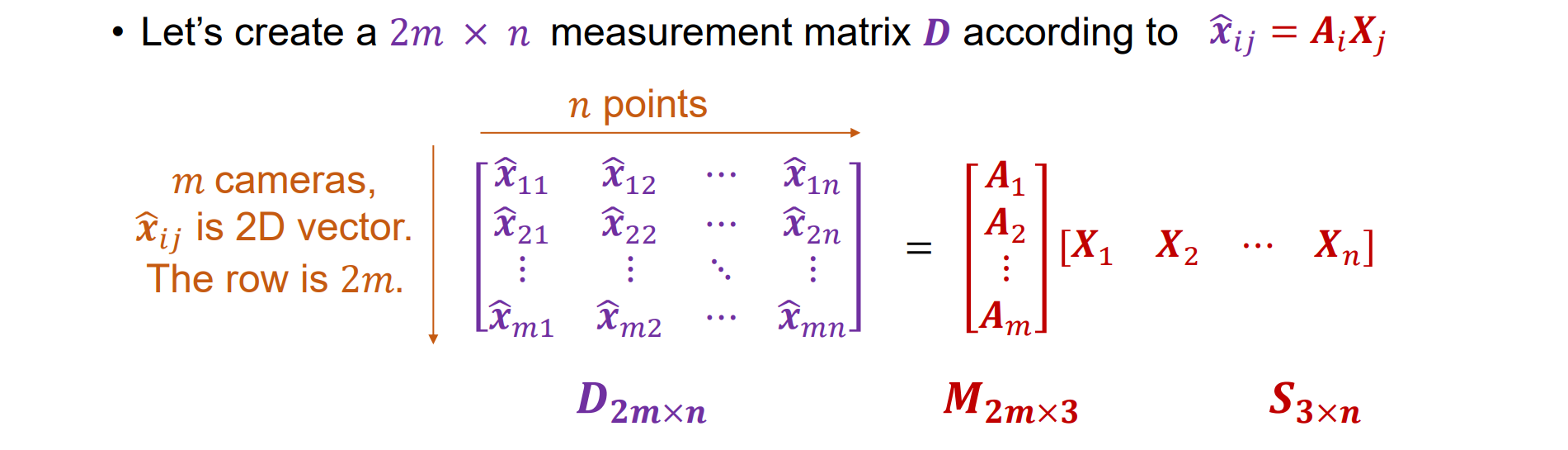
上述公式展开中:m是相机索引,n是点的索引,Ai是投影矩阵,Xi是投影坐标点
根据矩阵秩将 M、S 从 D 分解:D = MS。D的秩一定为3,因为M的秩为3,且D的秩为3
Factorizing the Measurement Matrix
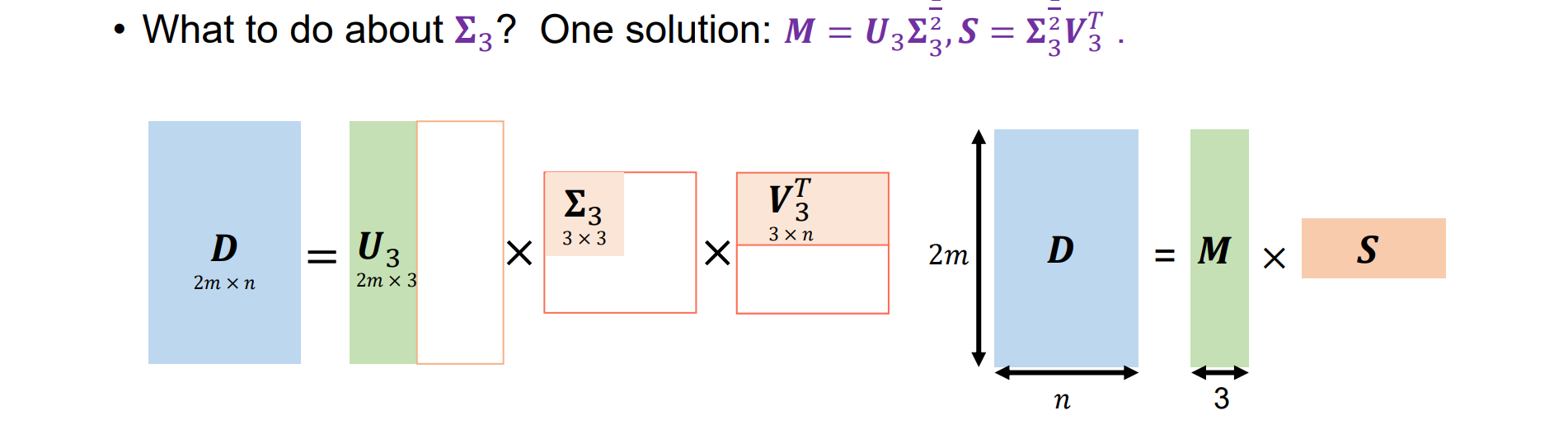
- 根据矩阵秩从 D 分解 M、S:SVD 分解:Mm×n = Um×m ⋅ Σm×n⋅ Vn×n.T
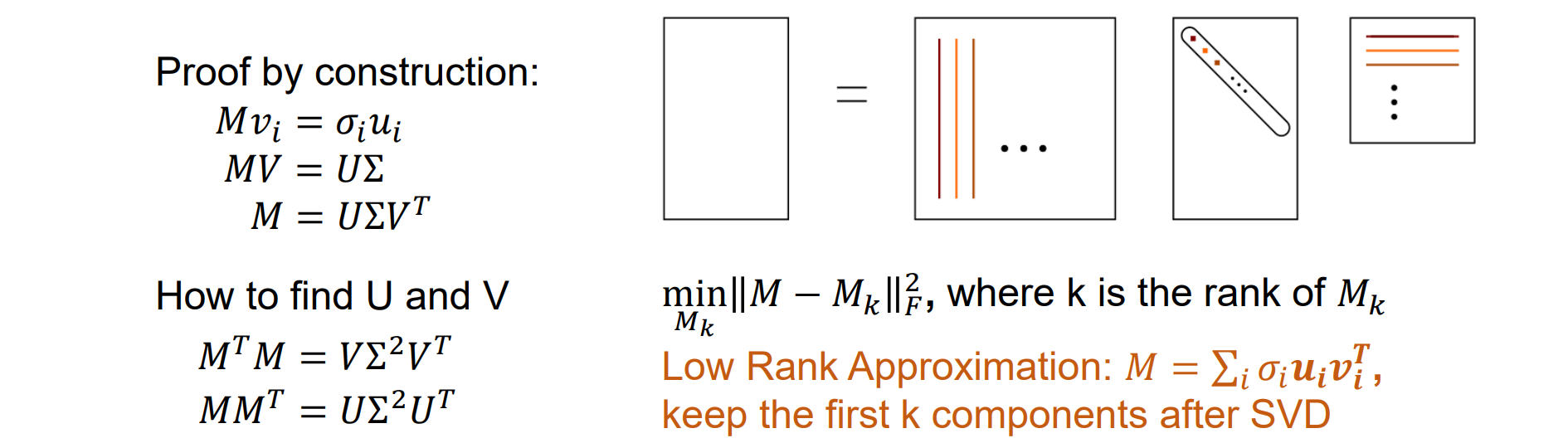
- 求得U,V,利用SVD低秩近似,可以只取前K(3)个大的奇异值,将小的置为0
Eliminating the Affine Ambiguity
加入其他约束可以消除仿射歧义,但仍有其他歧义
添加约束:使每个相机矩阵 AiQ 代表一个正交投影,即具有正交轴(行),即保直角
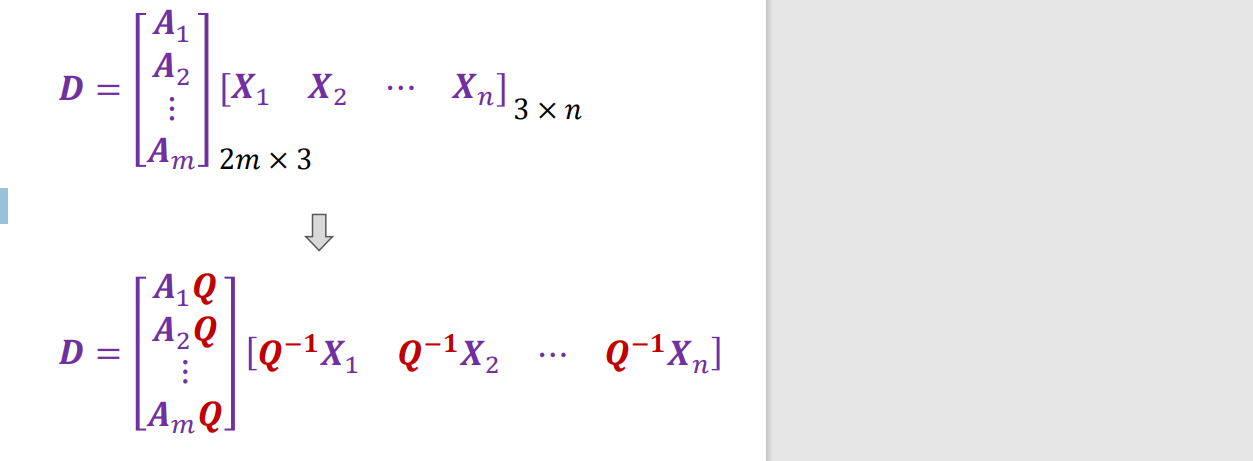
- 设 a1 和 a2 是 2 × 3 正交投影矩阵的行:通过投影轴正交可得m个约束,从而使Q变得唯一可解
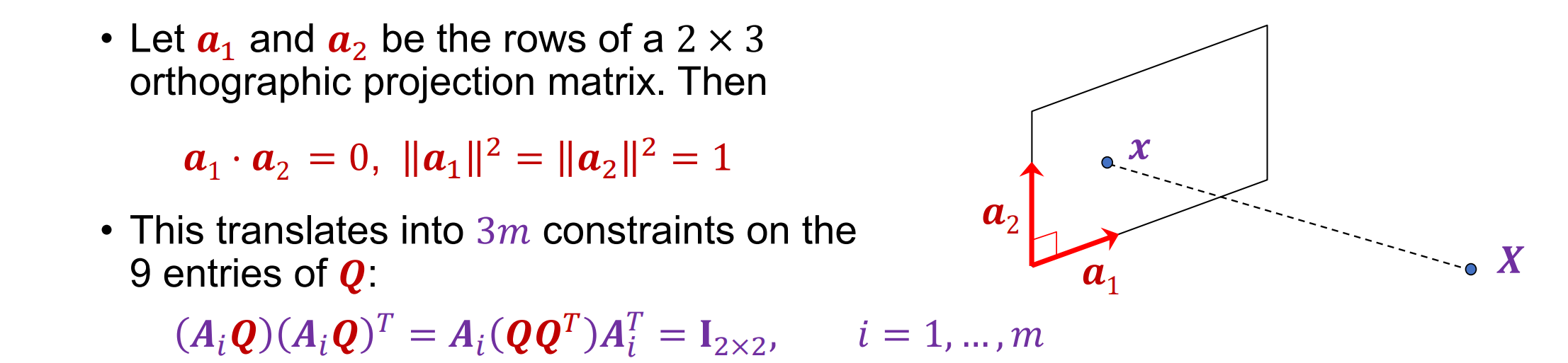
- 但是限制并非是线性的,所以需要设L = QQ.T得到关于L的等式且L是线性的。可以通过最小二乘法的到L,然后再通过Cholesky分解得到Q
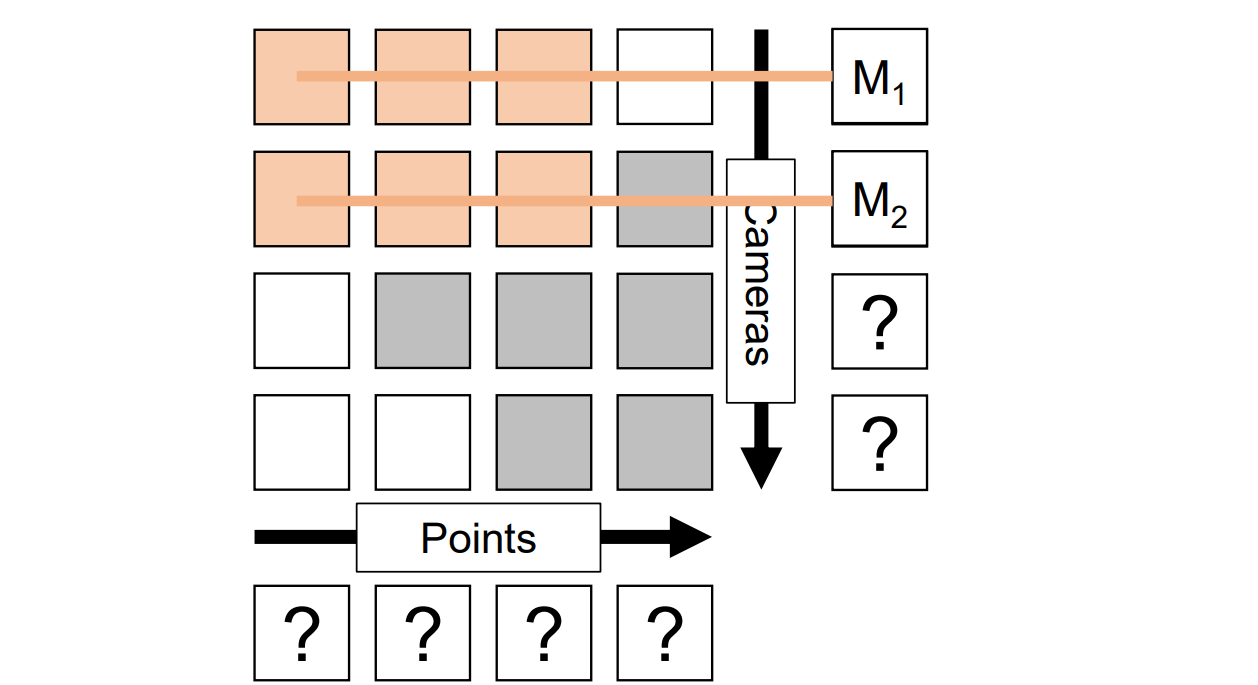
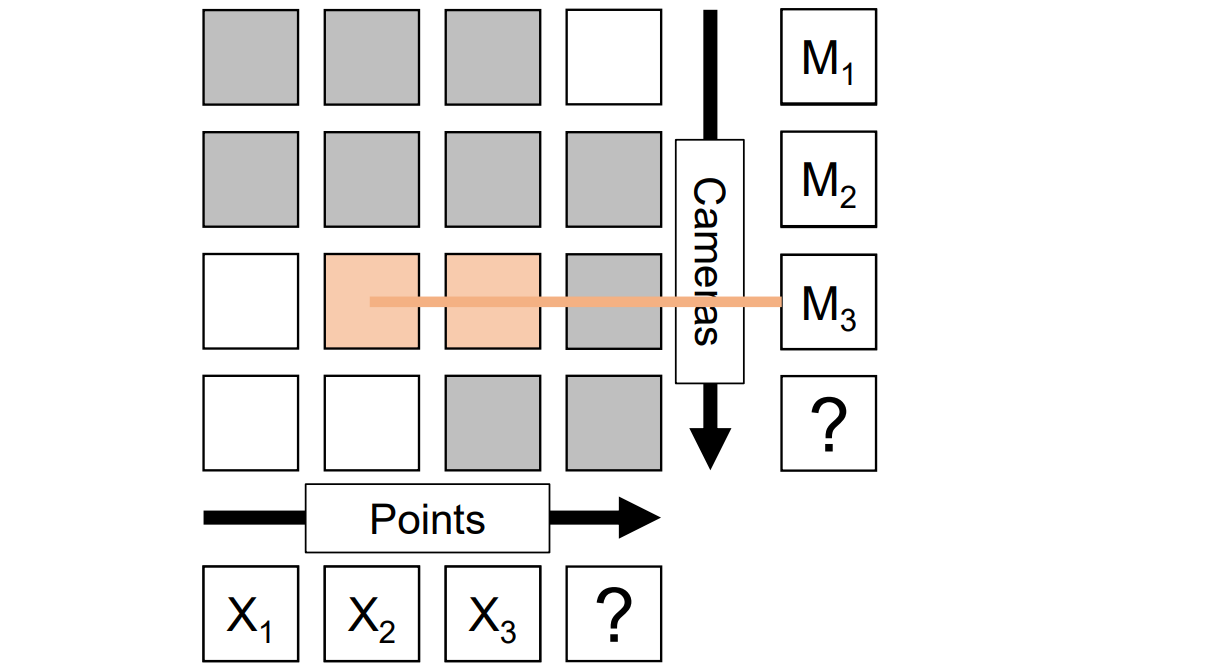
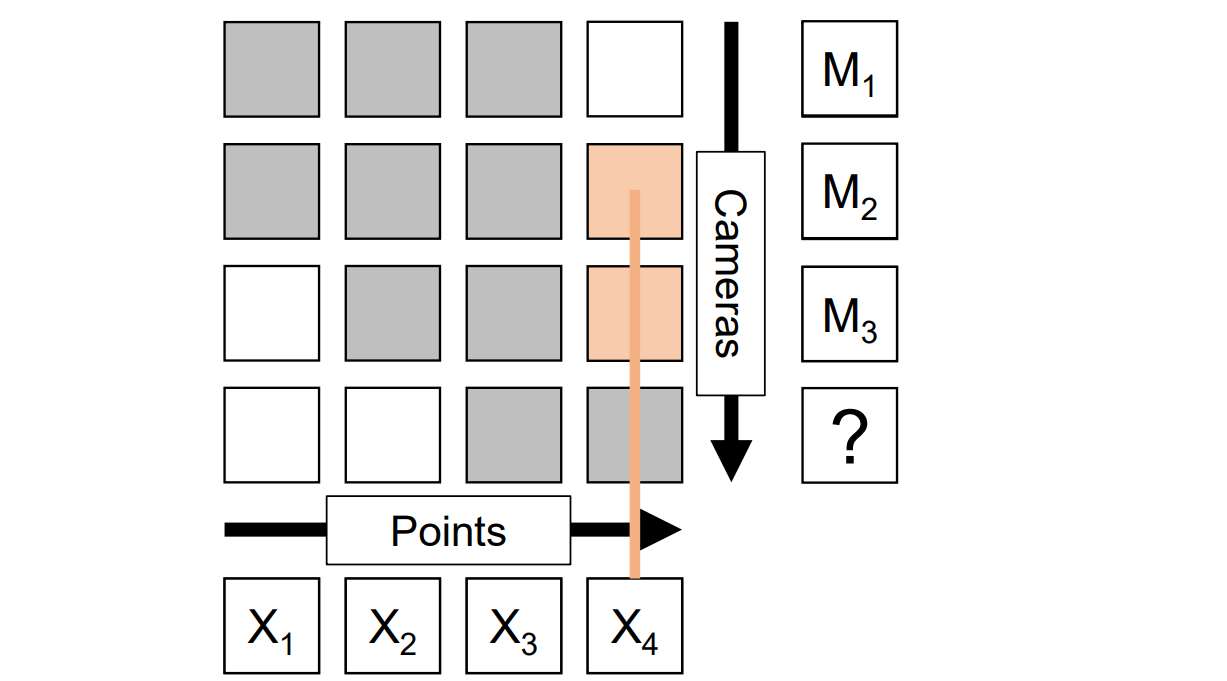
Dealing with Missing Data
到目前为止,我们假设所有点在所有视图中都可见
实际上,测量矩阵通常如下所示:由于有遮挡,是稀疏的,不可能看到所有点

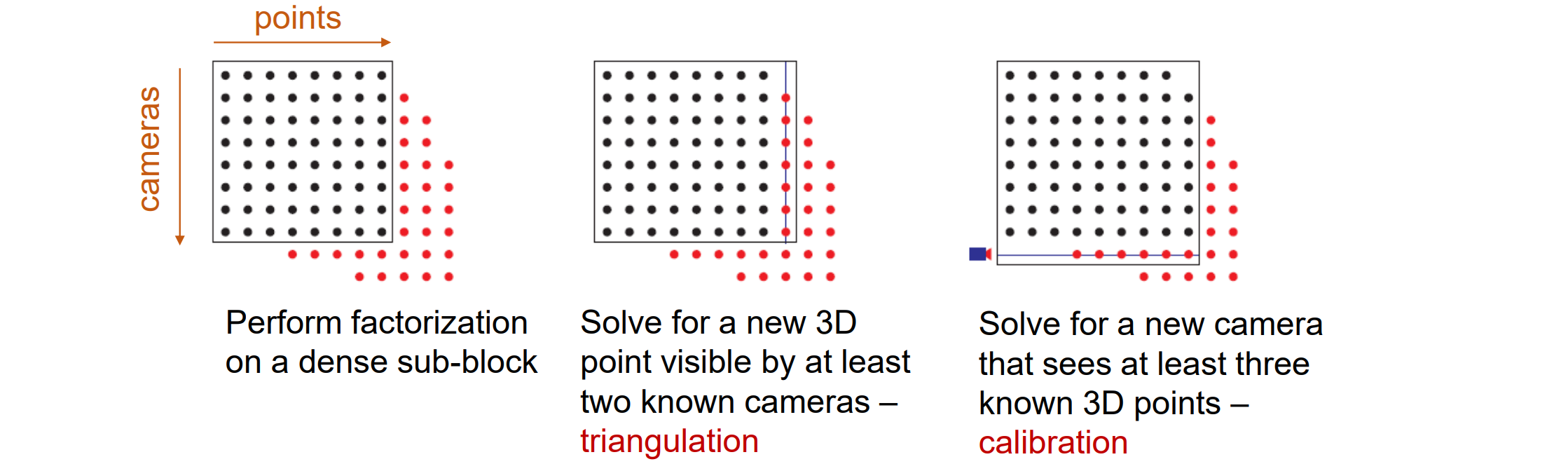
可能的解决方案:将矩阵分解为密集的子块,分解每个子块,并融合结果,逐块求解。然而在现实中却行不通
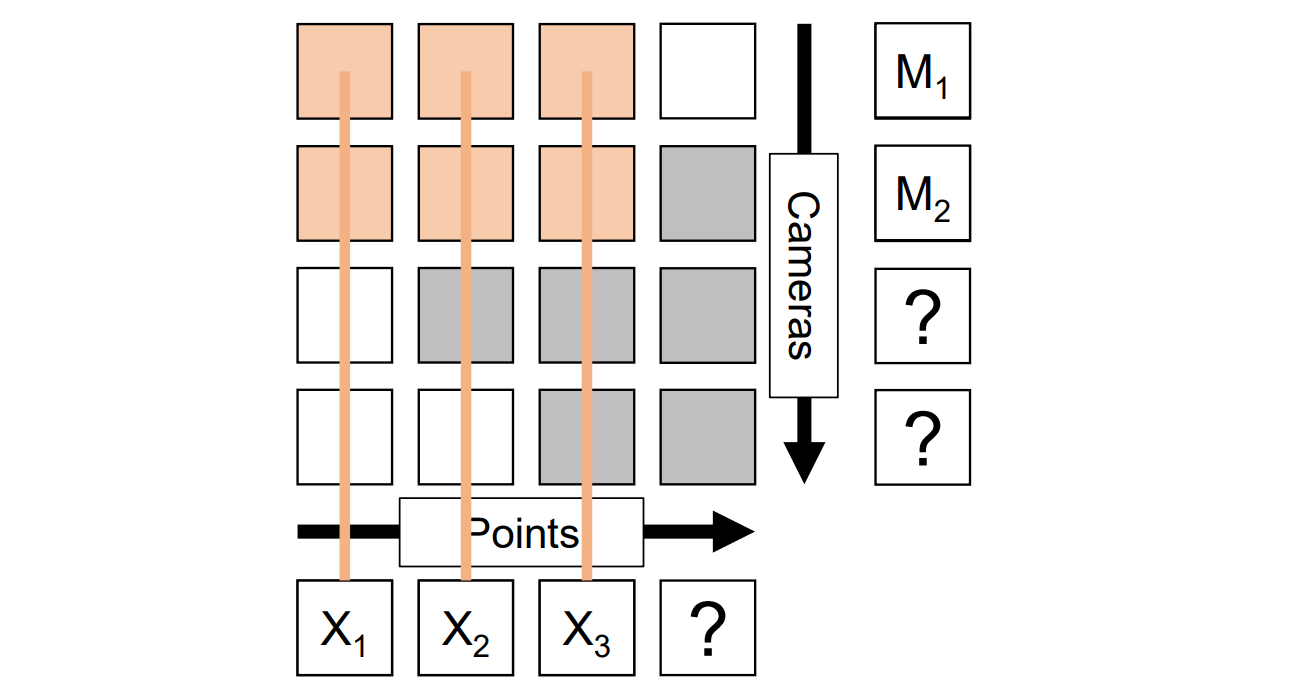
增量法(Incremental bilinear refinement):先求解,求解完后向右拓展一列以解决新的3D点,通过triangulation求解;再向下拓展一行以解决新的相机校准,用calibration求解,然后重复迭代此过程
Projective Structure from Motion(宽松条件下求解SFM)
- n 个固定 3D 点的 m 张图像,使得(忽略可见性):

问题:根据 mn 对应关系 Xij 估计 m 个投影矩阵 Pi 和 n 个 3D 点 Xj
在没有校准信息的情况下,相机和点最多只能恢复 4 × 4 投影变换Q,Q是一族解
2𝑚𝑛 ≥ 11𝑚 + 3𝑛 − 15时可解,对于两个相机,至少需要7个点
Projective SFM: Two-Camera Case
- 流程:
- 使用归一化八点算法(normalized eight-point algorithm)估计两个视图之间的基本矩阵 F
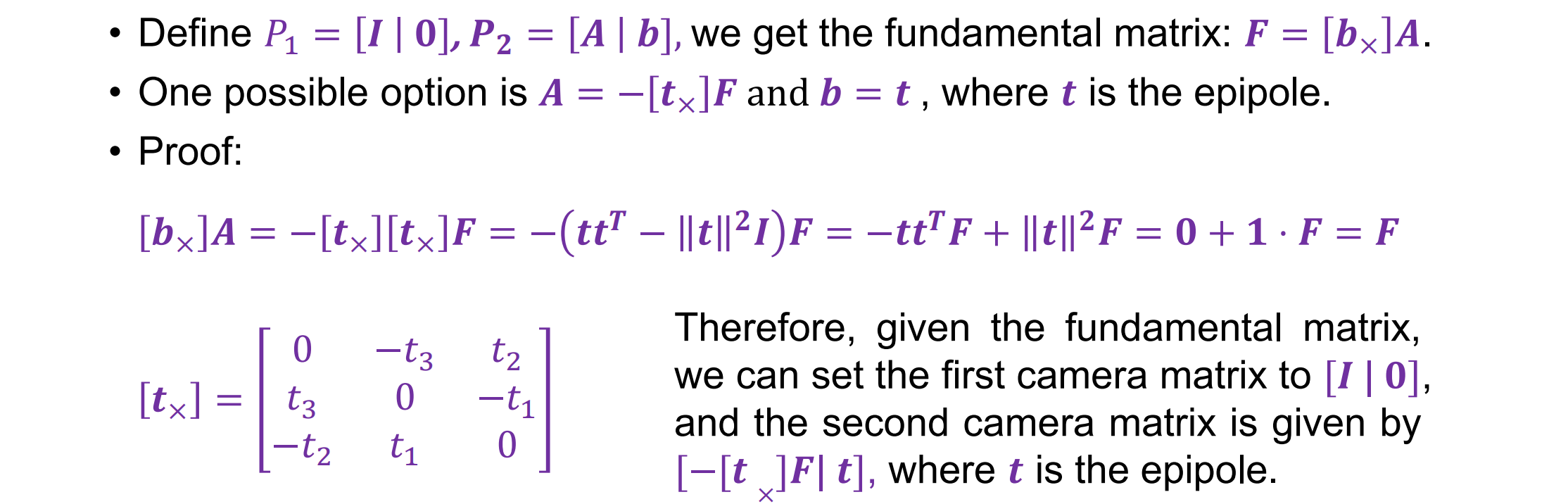
- 将第一个相机矩阵设置为 [I | 0]
- 然后第二个相机矩阵由 [A | t] 给出,其中 t 是极点 (F.Tt = 0),A = −[t × ]F
Cameras from the Fundamental Matrix
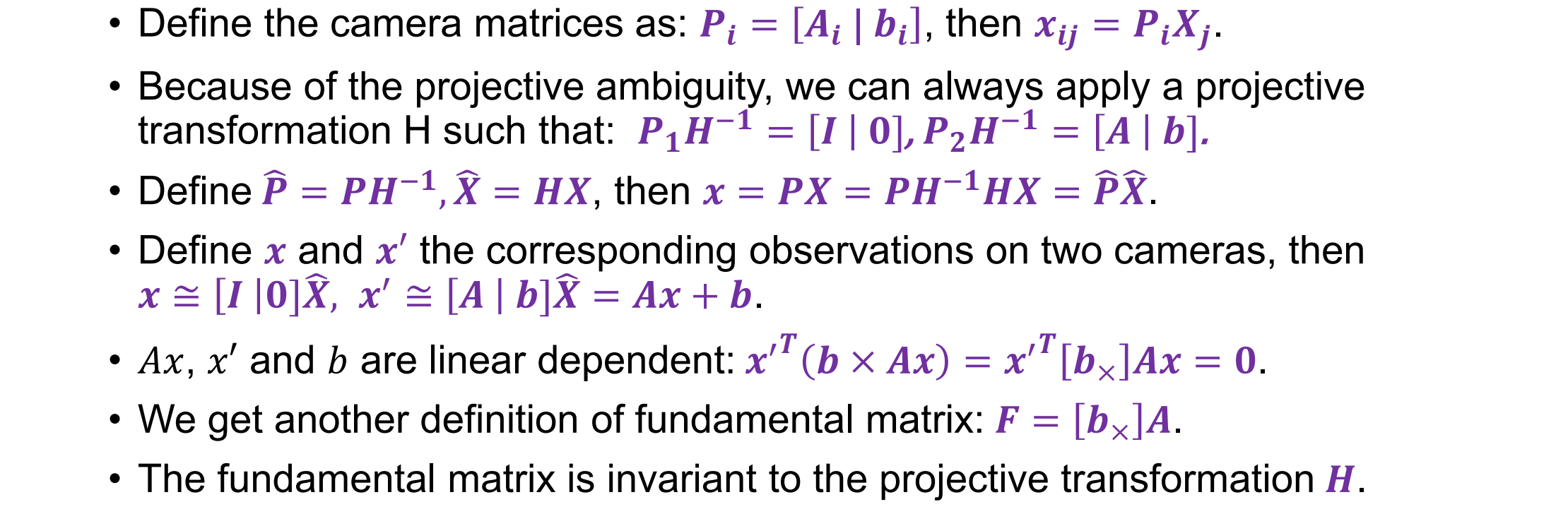
上述过程为基础矩阵的另一种定义方式。F与H无关,H是另一个投影矩阵
任务转化为:从F中分解A,b
Self-calibration
自校准是从透视(或仿射)重建中恢复度量重建的问题
可以通过对相机或者世界坐标系假设来消除歧义性完成自校准
ncremental Structure from Motion
Incremental SFM
核心思想:增量地增加相机的3D点
流程:
- 使用基础矩阵初始化相机参数 Mi = [Ri ,ti]
- 使用Triangulation初始化3D点Xj
- 再使用校准和可见的已知点求解相机矩阵,用3D点和2D点匹配可得一个新的相机
- 增量式的重复上述过程
- 问题:没有考虑3D点和相机放在一个整体进行优化
Bundle Adjustment
- 用于调整3D点和相机的非线性方法(更新P,X):最小化重投影误差。其中,wij代表可见性,0代表不可见;1代表可见

Photo Tourism: a Representative SFM Pipeline
Feature Detection
- Detect SIFT features,Other popular features: SURF, ORB, BRISK, …
Feature Matching
使用近似最近邻匹配来匹配每对影像之间的特征(高维空间上的最近邻插值)
使用 RANSAC 通过归一化八点法估计每对之间的基矩阵
Incremental SFM
选择一对具有大量内部值的图像(最好是 EXIF 数据)
- 从 EXIF 初始化内部参数(焦距、主点)
- 使用五点算法估计外部参数(R 和 t)
- 使用三角测量初始化模型点
当剩余图像存在时
- 查找与模型中的图像具有许多特征匹配的图像
- 对特征匹配运行 RANSAC 以将新图像注册到模型
- 三角测量新点
- 执行bundle adjustment平差以定期重新优化所有内容
- (可选)与 EXIF 数据或地面控制点的 GPS 对齐

